Какие микроконтроллеры более популярны у разработчиков

Микроконтроллеры GIGADEVICE. Инструкция по освоению
Микроконтроллеры GIGADEVICE. Инструкция по освоению
Статья была опубликована в журнале Компоненты и технологии №7 2017 г.
авторы: Хафизов Даян, Смирнов Григорий, Александр Сыров, alexandr.syrov@eltech.spb.ru
На сегодняшний день рынок 32-битных микроконтроллеров на основе ядра Cortex-M3 довольно широк. Популярностью у разработчиков цифровых устройств на основе микроконтроллеров пользуется продукция таких производителей, как Microchip, ST Microelectronics, NXP и т.д. Однако, недавно появился еще один производитель, готовый составить им конкуренцию – GigaDevice со своей линейкой микроконтроллеров GD32. В данной статье будет рассказано о микроконтроллерах GD32, приведено сравнение с ближайшим конкурентом, а также представлены примеры работы с одним из представителей семейства GD32 в популярной IDE Keil MDK-ARM.

Бюджетные 8-ми битные микроконтроллеры!
- Запатентованная технология FPPA – до 4х ядер на одном микроконтроллере
- Память программ от 1 кБ до 8 кБ (1 KW = 2 KБ)
- Большинство операций выполняются за один такт
- Микроконтроллеры для сенсорного управления сертифицированы СS10V
- Частота ядра до 8 МГц
- Кол-во выводов от 6 до 28
| Узнать больше |
Рисунок 1. Логотип компании GigaDevice
Компания GigaDevice (рис.1) была создана в 2005 году в Пекине и вышла на китайский рынок с микросхемами памяти. В 2008 году GigaDevice начали выпуск микросхем памяти SPI NOR FLASH с напряжением питания 3,3 В по технологии 180 нм. Примечателен тот факт, что это первая полностью самостоятельная разработка в Китае. За последующие 5 лет GigaDevice укрепили свои позиции на рынке микросхем памяти и значительно улучшили технологии производства, быстро осваивая более высокие технологические нормы. Сейчас компания производит SPI NOR FLASH с напряжением питания 1,8 В по технологии 65 нм и занимает третье место в мире по объемам продаж в сегменте микросхем энергонезависимой памяти с объемом производства более 1 млрд микросхем в год. Компания GigaDevice в высокой степени сконцентрирована на инженерной работе, так в компании больше половины состава сотрудников – инженеры. Кроме этого, у компании GigaDevice более 100 патентов и около 500 заявок на патенты.
В 2013 году компания GigaDevice приобрела лицензию на ядро ARM Cortex-M3 и объявила о начале производства собственных 32-битных микроконтроллеров GD32. Внешнее сходство и сходство в наименованиях с микроконтроллерами от ST Microelectronics подталкивает к мысли о полном «копировании», но это не так. Несмотря на идентичность в расположении контактов и схожесть характеристик, отличия между GD32 и STM32 есть:
- рабочая частота до 108 МГц для семейства GD32F1 (у STM32F1 до 72 МГц),
- объем FLASH памяти до 3 Мб (у STM32F2 не более 1 Мб),
- объем оперативной памяти до 256 Кб (у STM32 не более 128 Кб),
- и проч.
По сравнению с «одноклассником» STM32F1, микроконтроллеров GD32F1 обладают лучшим набором характеристик. В случае, когда не хватает flash-а для программы или хранения данных, или же не хватает быстродействия, оптимально использовать GD32F1. Также большим плюсом GD32 является более низкая, нежели у конкурентов, цена.
Ну что же, плюсы и минусы есть у всех. Проверим работоспособность микроконтроллеров GD32 на реальном железе. Возьмем отладочную плату GD32103E-EVAL (рис. 2) и рассмотрим несколько простых примеров.

Рисунок 2. Внешний вид отладочной платы GD32103E-EVAL
Начало начал. Помигаем светодиодами.
Несмотря на то, что микроконтроллеры GD32 и STM32 не являются абсолютно идентичными устройствами, они являются совместимыми как по выводам, так и по карте регистров в рамках одного семейства. Следовательно, микроконтроллер GD32F103ZET6 будет совместим по выводам с STM32F103ZET6. Таким образом, мы можем воспользоваться популярным среди разработчиков генератором исходного кода STM32CubeMX для создания демонстрационного проекта (рис. 3). В данном случае, ключевым отличием GD32F103ZET6 от «собрата» STM32F103ZET6 являются максимальная частоте работы ядра: 108 МГц у GD, против 72 МГц у STM. Также отметим, что микроконтроллеры серии GD32F103 могут иметь до 3 Мб встроенной Flash памяти против 1 Мб у STM32. Это может стать решающим преимуществом GD32F103 перед STM32.
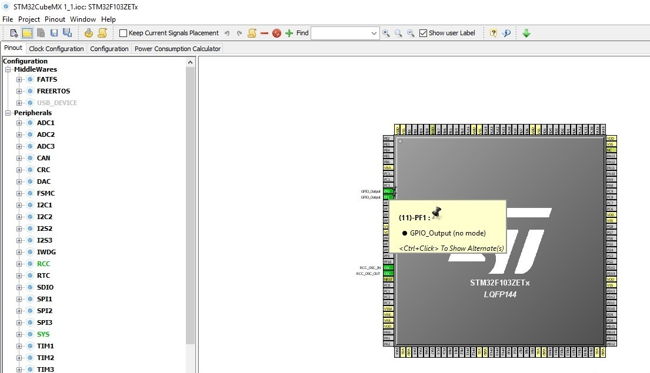
Рисунок 4. Настройки RCC для GD32F10x
Далее генерируем исходный код для Keil. После установки AddON-ов от GigaDevice в закладке Device появилась возможность выбрать MCU GD32 (рис. 5). В нашем случае выбираем GD32F103ZE.
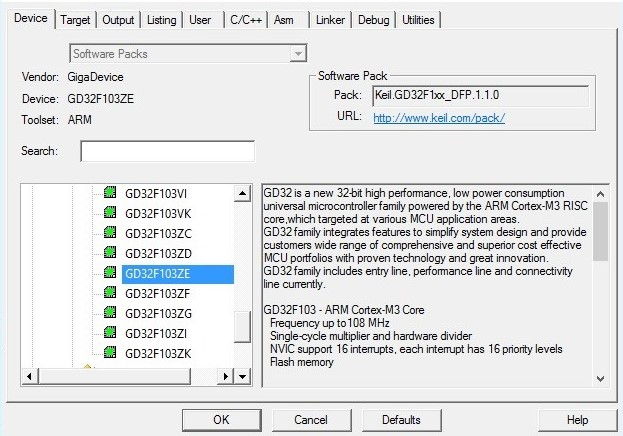
Рисунок 5. Конфигурирование Keil для работы с GD32
В файле main.c добавляем в цикл:
HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_1);
HAL_Delay(1000);
HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_0);
HAL_Delay(1000);
Затем собираем проект и приступаем к «прошивке» контроллера. На отладочной плате GD32103E-EVAL уже присутствует программатор GD-Link (так же, как и почти на всех отладочных наборах у STM). Так что после установки утилиты от GigaDevice, можем прошивать микроконтроллер и заниматься отладкой программы из Keil. В закладке Debug выбираем CMSIS-DAP Debugger (рис. 6) и в настройках указываем определившийся адаптер (рис. 7). Жмем «OK», прошиваем контроллер, перезапускаем контроллер, наблюдаем за двумя мигающими светодиодами ☺
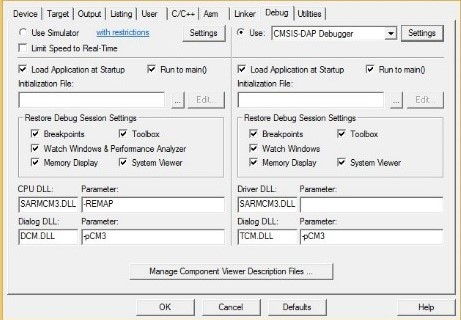
Рисунок 6. Настройка программатора.
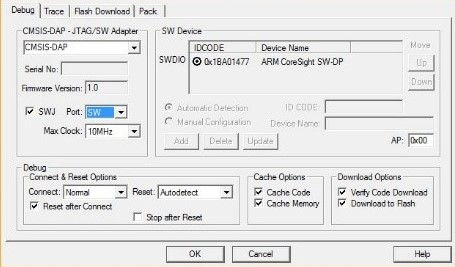
Рисунок 7. Окно выбора режима программатора
Итак, пока получается, что мало того, что для работы с GD32 можно использовать программное обеспечение от STM, так еще и библиотека HAL корректно работает.
Работа с UART, АЦП и таймерами.
Светодиодами помигали, теперь сделаем что-то посерьезнее. Будем снимать данные с АЦП и передавать их в UART. И делать это будем через прерывание от таймера.
Сделаем новый проект в STM32CubeMX. UART заведем на контакты PA9 (TX) и PA10 (RX), на PC3 заведем вход АЦП (рис. 8).
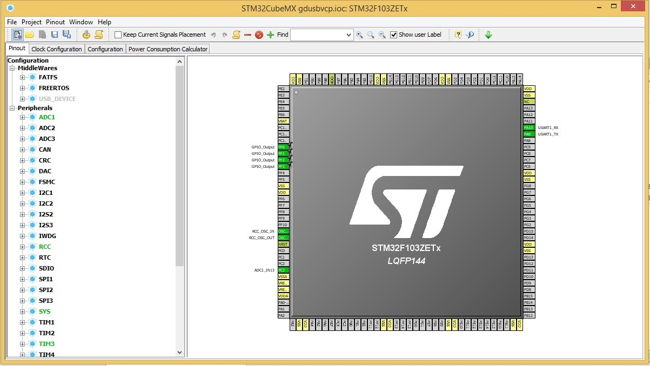
Рисунок 8. Конфигурирование входов-выходов для работы с UART и АЦП
Настроим UART как показано на рис. 9. Для этого перейдем на вкладку Configuration и выберем USART1.

Рисунок 9. Настройки UART
Также настроим ADC. Большая часть настроек остается по умолчанию.
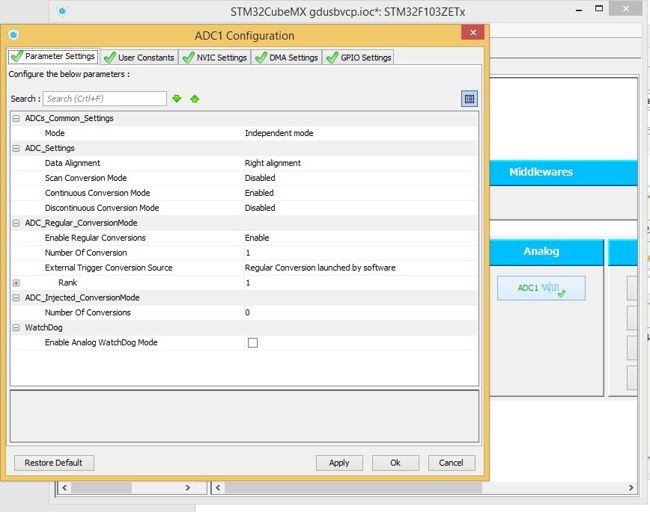
Рисунок 10. Настройка АЦП
АЦП на входе PC3 подключен к потенциометру на 10 кОм (рис. 11). В новом проекте будем снимать значение напряжения с АЦП. Опрос АЦП будем производить в прерывании от таймера TIM6.
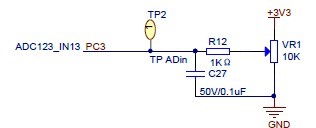
Рисунок 11. Подключение потенциометра к контакту РС3
Перейдем на вкладку Clock Configuration. В данном случае воспользуемся настройкой тактирования ядра и периферии, установленными по умолчанию: ядро тактируется частотой 48 МГц, тактирование периферии конфигуратор рассчитает автоматически (рис. 12).
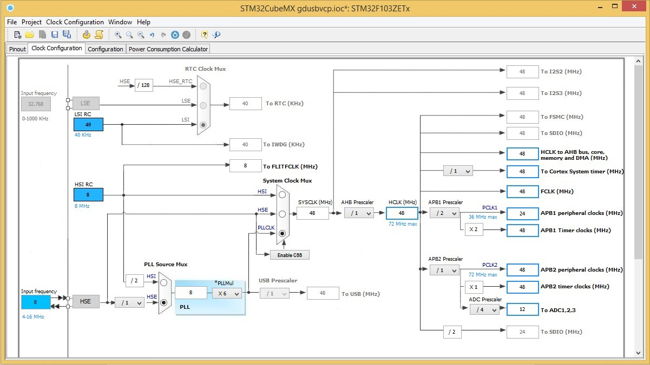
Рисунок 12. Настройки тактирования
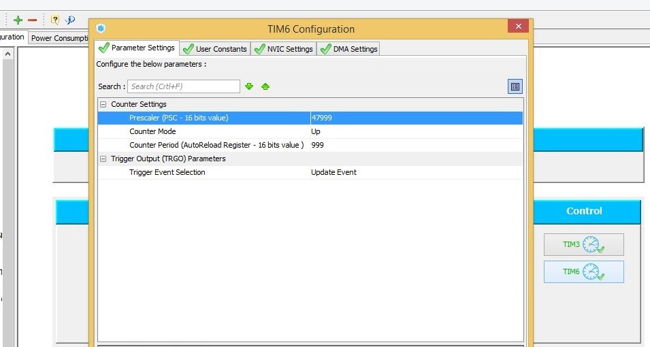
Рисунок 13. Конфигурирование таймера TIM6
Таймер TIM6 сконфигурируем так, чтобы прерывание от него срабатывало 1 раз в секунду. Поскольку периферия тактируется с частотой 48 МГц, то для получения периода в 1 секунду значение предделителя приравниваем к 47999, а регистр счетчика – к 999 (рис. 13).
Сгенерируем проект и откроем его в Keil. Все обработчики прерываний находятся в файле stm32f1xx_it.c. Находим обработчик прерывания от таймера TIM6 и вставляем туда функцию отправки данных в UART, как на рис. 14.
HAL_UART_Transmit – функция HAL для отправки данных в UART, сгенерированная STM32CubeMX. Эта и другие функции HAL для UART находятся в файле stm32f1xx_hal_uart.c
transmitBuffer – в данном случае массив, который мы объявили глобально и в который просто записали строчку, которую хотим передавать в UART.
Разработка электроники. О микроконтроллерах на пальцах
Задумывая технологический стартап, вы совсем не обязаны быть асом в электронике, гораздо больше шансов на хорошую идею имеет узкий специалист со знанием основ маркетинга, но, даже заказывая кому-то разработку, ориентироваться в возможностях современной элементной базы и представлять цену решения необходимо обязательно. Иначе можно потребовать невозможного, либо получить устройство с завышенной себестоимостью на устаревшей элементной базе.
Под катом попытка кратко и просто рассказать о возможностях современных микроконтроллеров людям от них далёким. Для тех, у кого есть идея нового электронного устройства, но отсутствует представление о том, что такое микроконтроллер. Те, кто хочет сделать первый шаг от занимательных экспериментов с платформой ардуино к проектированию собственных устройств, также могут найти в ней простые, но полезные советы. Я старался, не останавливаясь на технических подробностях, для этого и книги не достаточно изложить суть и дать несколько простейших, но полезных советов по схемотехнике, чтобы предостеречь от элементарных ошибок начинающих.
Краткое содержание статьи:
Защита кода, возможность его обновления и многообразие помогли микроконтроллерам завоевать мир
Любой умный прибор требует управления. В большинстве случаев сегодня этим занимаются микроконтроллеры — чипы, которые совмещают в себе микропроцессорное ядро, память и периферийные модули, отвечающие за связь с остальными компонентами устройства и внешним миром.

Микроконтроллеры — мастера на все руки. Один микроконтроллер способен заменить десятки специализированных микросхем, которые были бы необходимы для выполнения требуемых функций в случае, если бы роль вычислителя занимал микропроцессор.
Одно из неоспоримых преимуществ микроконтроллера — программа, под управлением которой он работает, скрыта внутри его корпуса (в секции под названием “память программ”) и очень хорошо защищена от взлома, конечно, в случае, если разработчик микрокода об этом позаботился, активизировав встроенные механизмы защиты. Таким образом, вы получаете защиту интеллектуальной собственности настолько большую, насколько это возможно в наши дни.

Что нельзя взломать — то можно скопировать. Зачем пытаться считать код, встроенной в микроконтроллер программы, с помощью дорогостоящих хитроумных приспособлений, если проще и дешевле найти профессионала, который может написать его заново? Возможно результат будет даже лучше, а функционал богаче чем у прототипа. Да это стоит денег, но содержание FLASH памяти сегодняшних микроконтроллеров настолько хорошо защищено, что попытки грубого “взлома” обойдутся ещё дороже. Кроме того, решается проблема интеллектуальной собственности, а вы, вместе с исходными кодами программы, получаете возможность развивать и совершенствовать своё устройство.
Память программ, в современных универсальных микроконтроллерах, является перезаписываемой, причём процесс перезаписи можно повторять не один десяток тысяч раз. Напрашивается использование этого факта для обновления программного обеспечения с целью устранения найденных в нём ошибок или расширения функций уже работающего устройства. Это достаточно просто реализовать — добавив в программу специальный участок кода под названием “бутлоадер”, вы получаете возможность обновлять программное обеспечение вашего прибора различными способами: в пункте сервисного обслуживания (если устройство имеет специальный, скрытый внутри корпуса от посторонних глаз, разъём), подключив к компьютеру по USB, через сетевой или даже беспроводной интерфейс. Главное, предусмотреть в приборе необходимую для этого периферию. Предоставляя возможность обновления ПО, всегда следует думать о безопасности, если этот процесс недостаточно защищён, мало того, что злоумышленники могут похитить ваш код, они могут модифицировать его и использовать в своих не исключено, что коварных целях. Например, взять под контроль вещи вашего “умного дома” или шпионить с помощью, установленной вами же у себя дома, WEB камеры.
Архитектура ARM — сегодняшний лидер рынка микроконтроллеров
Со времён Царя Гороха микроконтроллеры принято разделять по разрядности данных, над которыми они проводят операции. В подавляющем большинстве случаев, сегодня, в новых разработках, стоит останавливать свой выбор на 32 битных микроконтроллерах с ядром АRM. Существует огромное количество их модификаций и всегда можно подобрать экземпляр, наилучшим образом подходящий для решения вашей задачи. В зависимости от набора функций и производительности, цена чипа может составлять от десятков центов до десятков долларов.
Микроконтроллеры(MCU), в зависимости от архитектуры вычислительного ядра, принято разделять на крупные семейства. На сегодняшний день, для разработок устройств малой и средней сложности, наиболее популярны микроконтроллеры c ядрами от Cortex-M0 до Cortex-M7. Чем больше цифра, тем больше вычислительные (и не только) возможности, цена и максимальное энергопотребление. Не последнюю роль в популярности ARM сыграла преемственность архитектуры. Разработчик может с минимальными издержками модифицировать программный код своих предыдущих наработок, переходя от микроконтроллеров одного производителя к чипам другого и мигрируя между ядрами с разной производительностью.

Конкуренция с младшими братьями
Однако ARMы «рулили» не всегда. Я хорошо помню времена, когда абсолютными лидерами рынка были 8 битные микроконтроллеры и, с занятых позиций, их безуспешно пытались оттеснить 16 битные коллеги, но, по иронии судьбы, удалось сделать это только 32 битным старшим братьям. Так сложилось, что к моменту их появления, технологии изготовления чипов сильно удешевили интеграцию в них больших объёмов FLASH памяти. Воспользовавшись удобным случаем, программисты стали переходить с ассемблера на язык более высокого уровня — Си, структура которого отлично ложилась на 32 битную архитектуру. В результате 32 битные микроконтроллеры выполняли вычисления гораздо быстрее своих 8 и 16 битных коллег, но была одна проблема — у них был выше ток потребления.
Поэтому, поначалу, они использовались в случаях, когда требовалась большая вычислительная производительность.
Известно, что средний ток потребления вычислительного ядра микроконтроллера существенно увеличивается с поднятием его тактовой частоты. Поначалу 8 битные модели микроконтроллеров отличались заметно меньшим потреблением при сходной частоте и, кроме того, были способны работать от низкой тактовой частоты, вплоть до 32 кГц.
Энергопотребление микроконтроллеров сильно зависит от тактовой частоты ядра и периферии, чтобы её регулировать, для генерации стали использовать, широко применявшийся в радиопередающих устройствах, узел формирования тактовой частоты на основе ФАПЧ. Это позволило в широких пределах изменять тактовую частоту, не меняя задающий кварцевый резонатор. Периферийным модулям совсем не обязательно иметь такую же тактовую частоту, что и вычислительному ядру. Чтобы снизить их энергопотребление, частоту на них стали подавать через делители с программно-регулируемым коэффициентом деления. Ввели возможность отключать неиспользуемые модули. Эти меры сильно уменьшили энергопотребление, но оно по прежнему оставалось существенно больше, чем у 8 битных.
На короткое время сложился паритет — 32 битные MCU захватили нишу топовых приложений, а 8 битные уверенно удерживали позиции в устройствах, для которых было важно низкое энергопотребление. Он сохранялся до тех пор, пока 32 битные MCU не освоили в совершенстве «импульсный» режим работы.
8-битники, к тому времени, тоже научились это делать, но, из-за низкой производительности, бодрствовать им приходилось гораздо больше и, как результат, они начали проигрывать по энергопотреблению, особенно в задачах, требующих расчётов, что иллюстрирует картинка ниже.

Об укладке асфальта, пользе сна и его разновидностях
Итак, микроконтроллеры настолько хорошо научились считать, что стали выполнять свою работу очень быстро и большинство времени были вынуждены “бить баклуши”, пожирая энергию для выполнения холостых циклов. В устройствах с автономным питанием это сильно сокращает ресурс батарей или время работы от одной зарядки аккумуляторов.
Понаблюдайте за строительными рабочими которые кладут асфальт. Они резко активизируют свою работу, когда пришёл грузовик с новой порцией асфальта, а после его укладки снижают темп. Так и микроконтроллеры умеют повышать и снижать частоту тактирования ядра. Однако, им это даётся не так просто, как рабочим — одновременно изменится и частота работы всей внутренней периферии, поэтому, чувствительные к этому её части придётся перенастраивать.
Не проще ли, выполнив быстро всю работу, немного поспать. Зачастую, да. Причём виды сна микроконтроллеров отличаются ещё более драматично, чем у человека.
Можно просто вздремнуть. В этом случае наш чип всегда наготове и как только зазвенел будильник таймера или его потревожило внешнее прерывание, он просыпается практически мгновенно. Как человек во время дремоты может снять напряжение, но не выспаться толком, когда тебя постоянно дёргают, так и микроконтроллер может снизить своё энергопотребление в этом режиме “всего” раз в 10, называют этот режим SLEEP.
Лучший способ хорошо выспаться — раздеться, лечь в постель, задёрнуть шторы на окне и включить будильник. Однако, после такого сна, уже моментально в работу не включишься. Придётся, как минимум, предварительно ополоснуться холодной водой и одеться. Есть такой режим и у микроконтроллера, когда он ограничивает количество внешних раздражителей и выключает основной тактовый генератор. Это режим STOP. В нём можно уменьшить потребление в 1000 раз, но и на выход из него уже потребуется существенное время.
Теперь, представьте себе, что вы перед сном выпили изрядную дозу снотворного, отключили будильник и телефон, закрыли все окна и двери. Это будет режим STAND BY. Вывести из такого режима микроконтроллер можно только с помощью особых выводов и большая часть памяти о том, чем он занимался перед таким сном будет потеряна навсегда, придётся начинать работу заново. Зато находясь в таком режиме MCU потребляет ещё в два раза меньше.
Последний, весьма экзотический режим, напоминает уже кому, из которой нельзя выйти без специального оборудования. В этом случае работает только специальный генератор тем не менее, являющийся частью микроконтроллера на отдельном часовом кварце, который может функционировать от собственного источника питания и иметь буквально несколько байт оперативной памяти, предназначение которой напомнить микроконтроллеру о том, из какого состояния он в эту кому впал. Если остальные части микроконтроллера, при этом, отключить от питания, то энергопотребление может составить уже одну десятитысячную часть от активного режима.
Выбирая режим экономии энергопотребления необходимо помнить о последствиях применения:
- чем глубже сон, тем дольше пробуждение
- чем глубже сон, тем меньше способов вывести из него микроконтроллер
- чем глубже сон, тем меньше остаётся информации о предыдущем состоянии микроконтроллера
- для достижения минимальных заявленных значений, во многих режимах необходимо принимать дополнительные меры, например — отключения периферии
- для минимизации энергопотребления устройства в целом необходимо грамотно спроектировать схемотехнику всего устройства
- для минимизации энергопотребления устройства в целом, нужно позаботиться о том, чтобы остальные компоненты и цепи также имели микропотребление в неактивном режиме. Глупо предпринимать огромные усилия для того, чтобы опустить потребление микроконтроллера ниже одного микроампера и, при этом, применять в устройстве дешёвый стабилизатор с током собственного потребления в 100 микроампер
но встречается такое сплошь и рядом - для успешного использования режимов глубокого сна не только программа, но и схемотехника, должны быть тщательно продуманы, иначе, вместо экономии, можно получить весьма серьёзные проблемы — редко случающееся, зато “мёртвое” зависание устройства по необъяснимой причине, либо слишком частое пробуждение и, как результат, потребление на порядки выше ожидаемого

Если ваши программист со схемотехником не первый день винят друг друга в криворукости и, вместе, производителя в публикации нереальных цифр в даташитах на микроконтроллер, а ваше устройство сажает батарейки на порядок быстрее, чем вы рассчитывали, это повод, по крайней мере, обратиться к независимым высококвалифицированным экспертам.
Совсем коротко о технологии изготовления и о том, как появляются серии микроконтроллеров

Физически активная часть микроконтроллера, как и подавляющее количество других микросхем, обычно сформирована на пластине монокремния (назовём его, в данном контексте, ЧИП). Чипы занимают очень маленькую площадь, технологически же выгодно производить пластины большого диаметра, поэтому, обычно большое количество чипов, как соты, размещают на одной большой пластине и формируют, в ходе одного технологического процесса. В последствии пластины нарезают на кусочки, получая уже отдельные чипы, которые и помещают в корпуса. Разработка топологии и отладка технологических процессов нового чипа стоит очень дорого, а занимаемое на пластине одним чипом место, как правило, не велико. Производителям выгодно выпускать чипы крупными партиями, но пользователям требуются микроконтроллеры в разных корпусах — кому то важно получить корпус поменьше и подешевле, другому наоборот требуется побольше выводов, чтобы управлять LCD или внешней памятью с параллельным интерфейсом. Производителям выгодно перекрывать все ниши, чтобы клиенты не перебегали к конкурентам, не найдя оптимальной для себя модели.
Очень часто бывает выгодней выпустить крупной партией один универсальный чип и помещать его в разные корпуса, чем запускать десяток различных. У чипов, помещённых в корпуса с малым количеством выводов, часть портов (в данном контексте, под портами будем понимать контактные площадки на поверхности чипа, служащие для общения с внешним миром) просто останутся неподсоединёнными. Часто производители идут дальше — чтобы поднять спрос и цену на микроконтроллеры с большим количеством ножек, они искусственно обрезают функциональность тех, у которых их меньше — отключают некоторые функции, ограничивают объём доступной памяти и т. п.
Так на основе одного чипа формируют серии микроконтроллеров, существенно отличающиеся по объёму памяти и набору периферийных модулей, иной раз и в разы по цене. При этом чипы, в них установленные, могут нарезаться из одних и тех же пластин. Поскольку площадь, на которой размещается один чип, невелика, вклад её в себестоимость конечного изделия также мал и им можно пожертвовать. Становится выгодным отключение дополнительной памяти и других функций, например, на этапе тестирования — либо с помощью однократно программируемых битов конфигурации, либо пережиганием перемычек лазером. Лишь для наиболее массовых изделий имеет смысл для этого создавать слегка изменённый фотошаблон. Причём, совсем не обязательно там будет физически отсутствовать неиспользуемая память, её, опять же, можно просто отключить, удалив перемычки в шаблоне.

Так из одного стандартного дизайна чипа формируется целая серия микросхем.
Периферия простейшего ARM микроконтроллера за пол бакса
Процессорное ядро — это мозг, но, чтобы он не был подобен “сферическому коню в вакууме”, требуются аналоги органов чувств и конечностей.
В микроконтроллере их роль играют выводы на корпусе, к которым внутри корпуса могут подключаются порты(контактные площадки) чипа. В свою очередь, через внутренние коммутаторы, к одному и тому же порту могут подключаться различные периферийные модули.
Для начала рассмотрим периферию одной из простейших серий от ST на основе ядра Cortex-M0 — stm32F03.

Для этой серии имеем следующий набор базовых функций:
Часы реального времени (Real Time Clock или RTC) , которые могут запитываться с помощью отдельного вывода и работают от отдельного низкочастотного резонатора. Этот модуль потребляет крайне мало энергии, в случае пропадания основного питания он может часами работать от заряженного конденсатора, или годами от маленькой встроенной в прибор батарейки. Кроме этого, он может служить в качестве будильника, выводя микроконтроллер из состояния даже самого глубокого сна в заранее заданное время.
WatchDog — сторожевая собака мешающая микроконтроллеру заснуть навсегда, например, свалившись в бесконечный цикл или перейдя по несуществующему адресу. Его принцип работы прост. Программист настраивает таймер защиты от “зависания” на определённый период времени, допустим на секунду, и запускает его. Затем он расставляет, в выбранных им местах программы, короткие участки кода, которые перезапускают таймер с нулевого значения. Если за секунду не произошло ни одного сброса таймера, WatchDog считает, что с программой что-то не так и устраивает микроконтроллеру перезапуск. Программа начинает работать с начала, причём существует возможность определить являлся ли инициатором ресета WatchDog и учесть этот факт при запуске.
Универсальные цифровые входы-выходы (General Purpose Input-Output GPIO) — это самая распространённая функция, которую поддерживают большинство выводов микроконтроллера. Они могут конфигурироваться либо как входы, либо как выходы.
Рассмотрим работу в качестве входа. Если напряжение на входе микроконтроллера меньше некоего порога (как правило близкого к половине питания), то оно воспринимается как логический ноль, в противном случае как 1. Цифровые входы обычно имеют очень высокое входное сопротивление, поэтому, если их оставить не подключенными, их состояние может скакать из нуля в единицу и обратно, под действием наводок электромагнитных полей. Для того, чтобы этого не происходило, существуют специальные режимы, когда внутри чипа вход соединяется через сопротивление 20 — 50 КОм с плюсом питания микроконтроллера (pull-up) или с минусом (pull-down).
Если выводы сконфигурированы цифровыми выходами, то их программно можно перевести в высокий уровень равный напряжению питания микроконтроллера, либо низкий. Существуют и более хитрые режимы, но не будем вдаваться в чрезмерные подробности.
Советы начинающим разработчикам
Выводы микроконтроллера — мастера на все руки, но следует соблюдать простые правила, чтобы не вывести их из строя. Несмотря на все предосторожности, предпринимаемые производителями чипов, они боятся статики и перенапряжений, поэтому не стоит подсоединять их напрямую к разъёмам, выходящим за пределы платы. Необходимо, в этом случае, предпринять меры — либо воспользоваться специальными интегральными компонентами защиты, либо предусмотреть в схеме супрессор, стабилитрон или защитные диоды, плюс установить в разрыв между выводом разъёма и портом токоограничивающее сопротивление.

На рисунке выше изображён участок схемы, спроектированного мной устройства (спутникового модема), с элементами простейшей защиты портов микроконтроллера. X4 — разъём для внешних коммуникаций. Нас интересуют контакты 5-7, к которым присоединяются тревожные кнопки. Сигналом тревоги служит замыкание на землю, поэтому, в нормальном состоянии, на портах должно присутствовать напряжение питания микроконтроллера, что и обеспечивают резисторы R24-R26, номиналом 1 КОм. Супрессоры VD4-VD6 ограничивают напряжение на уровне 5 вольт, это допустимо потому, что применяемый мной микроконтроллер, хотя и питается напряжением 3,3 вольта, но имеет порты толерантные к напряжению 5 вольт. Резисторы R29-R31 на 100 Ом.
Подобная защита спасёт порты вашего микроконтроллера от внешних перенапряжений. У некоторых микроконтроллеров отдельные порты не боятся напряжений, превышающих их напряжение питания. Так у многих микроконтроллеров STM32Fxx почти все порты будучи сконфигурированными как цифровые могут работать с 5 вольтовыми цепями, но если они работают в аналоговом режиме, например в качестве входа АЦП, теряют эту способность и это необходимо учитывать при разработке схемы.
Пожалуйста, соблюдайте технику безопасности. Не оставляйте, свободные, висящие в воздухе порты микроконтроллера сконфигурированными в виде входов, особенно в устройствах временами уходящих в глубокий сон — это как минимум может значительно усложнить процесс прохождение вашего устройства теста на ЭМС (электро-магнитную совместимость). Если оставляете их входами, лучше замкнуть их на землю или питание. Либо программно сконфигурировать выходами.
Существует ещё один лайфхак. Иногда их можно оставить входом и замкнуть на другую цепь. Это помогает в случае очень плотной трассировки провести проводник «сквозь» микроконтроллер, что особо актуально для двухслойных плат.
Используя порты микроконтроллеров в качестве выходов, также стоит свериться с даташитом. Отдельные порты могут иметь разное ограничение по максимальному току, который от них можно получить не опасаясь выхода их строя — нагрузочную способность. Кроме этого, сам чип имеет максимальную нагрузочную способность всех выходов в сумме, которую не следует превышать.
Последнее, о чём хочется упомянуть, выходные порты ARM микроконтроллеров не реагируют на программные инструкции мгновенно, как у 8-битных микроконтроллеров. Они управляются через шину, и их быстродействие зависит от частоты тактирования соответствующего узла, которую можно менять программно. Если вы хотите быстрой реакции, позаботьтесь об увеличении этой частоты, если важнее уменьшить энергопотребление, наоборот выберите менее скоростной режим.
Температурный сенсор Микроконтроллер имеет свой собственный температурный сенсор, правда не слишком точный, тем не менее его можно, с определёнными допущениями, использовать для измерения температуры внутри корпуса прибора.
Уникальный серийный номер Каждый микроконтроллер имеет свой уникальный серийный номер, присвоенный ему на производстве. Очень удобная особенность, которую можно использовать при организации серийного производства ваших изделий.
Интерфейсы обмена данными Различные микроконтроллеры данной серии могут иметь по нескольку наиболее распространённых интерфейсов, сильно облегчающих общение с другими чипами и внешним миром:
- USART — асинхронный последовательный порт, часто использующийся для связи с компьютером
там он называется COM или RS232, модемами и другими устройствами - SPI — высокоскоростной интерфейс, который имеют очень многие чипы, например внешняя память
- I2C — двухпроводной интерфейс, разработанный для общения с датчиками и другой периферией на небольшом расстоянии и небольших скоростях обмена. Большой его плюс заключается в том, что одновременно к одной шине можно подключить десятки различных устройств
Аналого-цифровой преобразователь АЦП или ADС на котором придётся остановиться подробнее.
Чрезвычайно полезный модуль, который способен измерять напряжение аналоговых сигналов. Оценивает он их в долях от величины опорного источника сигнала, в нашем случае это напряжения питания аналогового модуля микроконтроллера, которое может быть равным или немного ниже основного напряжения питания чипа. Теоретическая точность работы АЦП зависит от его разрядности. В современных микроконтроллерах чаще всего применяется 12 разрядный АЦП последовательного приближения, реже 10 и как экзотика встречается 16.

При питании 3 вольта 12 разрядный АЦП микроконтроллера будет иметь разрешающую способность 3/4096=0.00073 Вольта — лучше одного милливольта.
Но на практике достичь этого идеала бывает не просто.
Подробности для начинающих разработчиков
На практике всё бывает далеко не так красиво и точность измерений может снижаться по многим причинам. Ниже перечисляю основные, хорошо известные любому опытному электронщику, а также простые но эффективные способы сведения их пагубного влияния до минимума
нестабильность напряжения источника питания АЦП
- применять для питания MCU линейные стабилизаторы с хорошими параметрами
- применять для питания аналоговой части MCU высокостабильные источники опорного напряжения
- подключать аналоговое питание к цифровому через простейшие фильтры низкой частоты — подавать питание на аналоговую часть MCU через индуктивность и в непосредственной близости от входа микроконтроллера устанавливать керамический конденсатор с диэлектриком XR7 ёмкостью 100 нанофарад, а ещё лучше, параллельно ему включить танталовый конденсатор с ёмкостью в одну — две микрофарады.
- пропускать входной сигнал хотя бы через простейший ФНЧ, состоящий из резистора и конденсатора. Для борьбы с помехами от передающих радиотрактов и короткими импульсными помехами иногда достаточно одиночного конденсатора с диэлектриком NP0 ёмкостью в несколько десятков пикофарад, установленного между входом и землёй, в непосредственной близости от входа АЦП
- не экономить на блокировочных конденсаторах, по крайней мере самого микроконтроллера, устанавливать их в непосредственной близости от каждого вывода питания и в других местах, рекомендованных производителем, рекомендованного им номинала
- тщательно выбирать месторасположение компонентов и соблюдать правила трассировки цепей питания и особенно “земли”, в идеале аналоговая и цифровая земли должны соединяться в одной точке — рядом с выводом аналоговой земли микроконтроллера

- правильно выбирать параметры настройки АЦП, например во многих микроконтроллерах можно увеличить время зарядки входной цепи, правда тут приходится идти на компромисс, снижая быстродействие
- устанавливать на входе АЦП буферные усилители на основе ОУ (операционный усилитель), или повторители напряжения. Выбирать их по принципу самых дешёвых не стоит, можно не улучшить, а ухудшить ситуацию, причём значительно. Если не хватает собственного опыта, лучше поискать специально рекомендованные производителями для подобных приложений
Выше изображён участок реальной схемы для подачи питания на аналоговую часть микроконтроллера в устройстве с батарейным питанием. В данном случая я использовал АЦП для оцифровки сигнала с аналогового MEMS микрофона и поэтому имело смысл выделить в отдельную цепь не только аналоговое питание, но и аналоговую землю. В большинстве случаев это избыточно, для того чтобы от неё действительно был толк, нужна ещё и правильная трассировка.
От цепи VBUT питается вся цифровая часть микроконтроллера. На всякий случай привожу номиналы элементов: R5-10 Ом, С10 0.1 мкФ, без индуктивностей L1 и L2 BLM18PG471SN1D в большинстве случаев можно обойтись.
Ещё один любопытный пример из моей практики. В плате, на которой размещалось большое количество высокопотребляющих чипов ASIC, необходимо было измерять их температуру. Самый простой и дешёвый способ — использование высокоомных термисторов. В качестве фильтров я применил конденсаторы достаточно большой ёмкости, воспользовавшись тем фактом, что температура меняется сравнительно медленно. Для оцифровки звука такой фокус однозначно бы «не прокатил».
Осталось упомянуть ещё одну важную особенность АЦП, характерную для микроконтроллеров. Собственно, модулей АЦП в нём, как правило, один или два, а вот входов может быть много. В описываемой серии модуль 1, а входов может быть до 16. Как же так? Очень просто, входы подсоединены к нему через коммутатор. Если вы собираетесь измерять напряжение с 10 входов, то должны организовать цикл — последовательно переключить коммутатор к каждому из 10 входов и сделать измерение. Это необходимо учитывать, рассчитывая времена измерения. В данной серии АЦП, теоретически, способно сделать измерение за 1 микросекунду. Получается, что полный цикл 10 измерений у вас займёт точно больше 10 микросекунд!
Система прямого доступа в память ПДП или DMA — ещё одна архиважная вещь. Этот модуль позволяет пересылать данные от периферии в память или наоборот.
Например, с его помощью вы можете выделить участок памяти для хранения данных, приходящих из АЦП и сделать из него кольцевой буфер. Далее запускается АЦП в режиме считывания данных через равные промежутки времени. Используя механизмы DMA, считанные данные будут, без участия ядра, самостоятельно, байт за байтом, помещаться в выделенный буфер. Когда буфер будет полностью заполнен, ядро получит сигнал и приступит к их программной обработке, а система DMA начнёт процесс загрузки сначала. Поскольку DMA имеет несколько каналов, то никто не мешает реализовать для нашего случая автоматический вывод на USART данных из буфера. В результате мы получим, работающий без использования ядра процесс передачи считанных с АЦП в USART, и не простая работа программиста по конфигурации DMA окупится сторицей.
Модуль широтно-импульсной модуляции ШИМ или PWM , в силу ограниченности статьи не будем останавливаться на нём подробно, отмечу только, что это крайне полезная и широко используемая функция, с помощью которой возможно управлять яркостью светодиодов, скоростью вращения двигателей, рулевыми машинками, конструировать интеллектуальные DC-DC преобразователи и даже звук синтезировать.
Что можно получить, добавив 30 центов?
Переход на Cortex-M0+. Самый дешёвый способ получить дополнительные функции
А какие дополнительные плюшки предлагает микроконтроллер новейшей серии с ядром чуть посовременнее Cortex-M0+, при стоимости на 20-50 центов дороже аналогов в рассмотренной выше серии по корпусу и количеству выводов?
Таблица отличий между сериями

- в два раза увеличилась максимальная тактовая частота
- с 2 до 1.7 вольт понизилось минимальное напряжение питания
- АЦП способно работать в два с половиной раза быстрее
- появились два канала 12 битного цифро-аналогового преобразователя. Это крайне полезная функция, с помощью которой возможно формировать на выводах сигнал заданного напряжения с точностью лучшей чем 1 мВ, например сигналы произвольной формы в звуковом диапазоне частот
- появились компараторы — устройства для сравнения величин двух аналоговых сигналов, это бывает полезным скажем для определения момента возникновения перегрузки по току
- добавлен USB интерфейс, посредством которого можно подключать устройства к компьютеру. Особый интерес вызывает наличие поддержки опций управления питанием для реализации USB type3-C совместимого интерфейса. О нём я рассказывал в одной из своих статей на Хабре
- появился ускоритель AES для процедур 256 битного шифрования/дешифрации
- UART получил возможность работы в режимах сна и аппаратную поддержку протоколов LIN (простая сеть, широко используется в автопроме), IRDA (протокол передачи данных посредством инфракрасных светодиодов, вспомните телевизионные пульты), SIMcard…
- расширены возможности таймеров и модуля PWM
- верхняя граница температурного диапазона работы поднялась до 125 градусов
- увеличена надёжность работы за счёт расширения режимов перезапуска при возникновении проблем с питанием
- добавлен “честный” аппаратный генератор случайных значений — полезная функция в криптографии
А что добавит переход на Cortex-M4, кроме возросшей в пару раз цены?

- Максимальная тактовая частота вырастает уже до 80 МГц
- Появился блок для ускорения вычислений с плавающей точкой
- Ясное дело, максимальная встроенная память увеличилась
- Модели с количеством ног 100 и более поддерживают работу с внешней статической памятью
- USB научился работать в режиме HOST
- Появился контроллер CAN интерфейса. Это очень перспективный интерфейс разработанный для высоконадёжных приложений. Своё победное шествие он начал с автомобильной промышленности и уже почти 20 лет ведёт затяжную войну с давно устаревшим RS-485 в крайне консервативной отрасли промышленной автоматизации.
- Появился интерфейс для подключения SDcard. Очень полезная функция — добавляете в своё устройство держатель за 50 центов и получаете съёмный носитель размером в десятки Гигабайт! С большинством карт удаётся работать и по обычному SPI, но намного медленнее
- Добавили встроенный Операционный Усилитель с большим разнообразием режимов работы. Именно благодаря этой и предыдущей функциям, для своего последнего проекта беспроводного стетоскопа, пришлось остановить выбор на M4 вместо M0+. В результате появилась возможность управлять усилением сигнала с MEMS микрофона и сохранять десятки часов аудиозаписей работы сердца на SD карте
- Криптомодуль научился аппаратно считать HASH функции.
- Контроллер сенсорных приложений усовершенствован и теперь поддерживает уже не только кнопки, но и элементы прокрутки
Cortex-M7 — когда хочется большего.

В подавляющем количестве проектов возможностей предоставляемых вышеописанными ядрами достаточно, но случаются и исключения. Лично со мной такое случалось всего пару раз, причём лишь один раз по действительно уважительной причине — требовалась высокая производительность для подготовки данных для ASIC, контроллер Ethernet и шина CAN-FD c повышенной скоростью обмена.
Если на уровне универсальных микроконтроллеров с ядрами Cortex 4 и ниже, на мой субъективный взгляд, по параметру цена/функциональность сейчас лидирует фирма ST, то в области более высокопроизводительных чипов она уступает лидерство ATMEL, вернее, теперь уже недавно поглотившему его MICROCHIP. Поэтому я остановил свой выбор на серии ATSAMV71, стоимостью от 6 долларов.
Помимо вышеописанного (контроллер Ethernet и шина CAN-FD), по большому счёту, мы получаем, существенно увеличивающее производительность ядро с ускорителем операций, работающее на тактовой частоте до 300 МГц, интерфейсы для подключения видеоматрицы и поддержку динамической памяти.
В заключении попрошу имеющих опыт общения с микроконтроллерами попрошу выбрать подходящий ответ на вопрос.
Микроконтроллеры

Также как и другие производители, STM озабочена все еще высокой популярностью 8-ми разрядных микроконтроллеров. Хотя на замену уже предлагается множество вариантов систем, разработчики выдают все новые модели. Одним из таких проектов стала серия микроконтроллеров STM 32 F 03 x . Она пришла на замену STM 32 F 05 x и во многих публикациях уже получила громкое имя вроде «Убийцы AVR ок». Тем не менее, при детальном рассмотрении не все так безоблачно, как того хотят рекламные заявления.
LPC800 — новые микроконтроллеры от NXP

В конце 2012 года фирма NXP анонсировала выпуск новых микроконтроллеров серии LPC 800. Главной задачей перед этими микросхемами поставлено вытеснение старых, 8-ми битных контроллеров с рынка. Поэтому в новой серии упор сделан на дружественность к разработчику и простоту внедрения. Множество новшеств, примененных производителем, и традиционные корпуса делают LPC 800 интересным вариантом для разработок простых электронных устройств, особенно с батарейным питанием.
Улучшенное ядро микроконтроллеров серии PIC16
Микроконтроллеры серии PIC 16 одно время находились на вершине популярности. Хорошо отработанное ядро, высокая надежность и простота освоения делали эти микросхемы востребованными среди самого широкого круга любителей и специалистов. Но техника не стоит на месте и с началом массового распространения ARM -микроконтроллеров, старые 8-ми битные системы начали сдавать позиции. При этом многие преимущества все равно остались за ними и компании-производители, пытаясь сохранить позиции, постоянно совершенствуют свои изделия. Коснулось это и серии PIC 16.
Микроконтроллеры серии PIC12
Микроконтроллеры PIC 12 наряду с серией PIC 10 занимают нишу маломощных устройств в линейке процессорной продукции Microchip . Минимум периферии и корпус с 8-ю выводами предполагают их применение только в относительно простых приложениях. Эти же факторы и вытекающая из них низкая стоимость, обусловили популярность данных микроконтроллеров среди большого числа радиолюбителей.
Микроконтроллеры Cortex-M0/M3/M4
Микроконтроллеры Cortex-M стали сегодня одними из самых популярных процессоров, применяемых при разработке и изготовлении электронной техники. Высокая вычислительная мощность, широкий набор периферии и низкая стоимость делают эти устройства привлекательными для самого широкого круга разработчиков. При этом каждый желающий может выбрать наиболее подходящий вариант для решения конкретной задачи. Производители предлагают огромное количество разнообразных микросхем, общим для которых остается только процессорное ядро. На сегодняшний день распространение получили 3 варианта ядер: Cortex-M0, Cortex-M3, Cortex-M4. Отличия этих моделей не всегда явно прослеживаются, поэтому данная статья делает попытку разобраться в особенностях этих вариантов.
V850 — микроконтроллер №1.

Самая продаваемая в мире линейка микроконтроллеров, во всяком случае, по уверению производителя, практически не известна в России. Разработана она японской фирмой NEC уже свыше 15 лет назад, а предоставляется фирмой Renesas , под общей маркировкой V 850 ES .
Еще статьи.
- Микроконтроллеры Cortex-M
- Микроконтроллеры PIC
- Микроконтроллеры
- ARM процессоры
- MIPS процессоры
Тотальный микроконтроль. Какие бывают микроконтроллеры и как выбрать подходящий
Микроконтроллеры, как ты знаешь, в современной жизни повсюду и контролируют работу самой разной бытовой техники и электроники. В последние годы они стали мощными и дешевыми, а средства разработки для них — простыми, поэтому их часто покупают в рамках увлечения сборкой собственных гаджетов. В этой статье я расскажу, какие бывают контроллеры и как их выбирать, если ты планируешь создать свое умное устройство.
![]()
INFO
Микроконтроллер (Micro Controller Unit, MCU) — микросхема, предназначенная для управления электронными устройствами.
Определение выше что-то напоминает. Ах да, микропроцессор! Эти два сложных (в сравнении с остальными) электронных компонента похожи. Они обрабатывают цифровую информацию и выполняют программы. Но микроконтроллер несколько интереснее: он уже содержит оперативную память (RAM), постоянную память (ROM), память программы (Flash) и некоторую встроенную периферию. С ним легче начать работать, ему не нужно много обвязки для функционирования.
С появления в 70-х годах первых микроконтроллеров необходимость в проектировании сложного устройства отпала. Долгое время монополию на их производство держала компания Motorola, но их продукция была дороговата для обывателей. Сейчас же американские компании теснят конкуренты из Азии, которые готовы осчастливить каждого за чисто символическую сумму.
Давай вместе попробуем разобраться в современном рынке микроконтроллеров. Замечу, что говорить мы будем только о бюджетных и широко специализированных модельных линейках, то есть о тех, которые используют электронщики.
PIC

Открывает наш парад компания Microchip Technology с серией PIC. Эти МК отличаются между собой разрядностью (8/16/32), набором периферии и корпусом чипа. Восьмибитные варианты же делятся на четыре семейства: baseline, mid-range, enhanced mid-range и PIC18. Более подробная информация приведена в таблице.

Также есть 16-битные «пики» — PIC24F и DsPIC30/33F. Ну и 32-битные — PIC32MX. Эти непонятные сочетания букв и цифр — часть идентификатора чипа. То же, что и марки у машин. Например, широко распространенный камень PIC16F628A расшифровывается так: семейство PIC16F6 (Mid-range), а остальная часть имени — указатель на конкретный камень. У рассмотренных далее МК в имени может содержаться еще больше информации.
Эти микроконтроллеры имеют среднюю стоимость. Например, камень PIC6F628 в Chipdip стоит около 150 рублей, а PIC18F2550 — 620 рублей.
![]()
WWW
Более дешевые экземпляры имеют в своем составе минимум периферии. У упомянутого ранее PIC6F628 следующие характеристики: встроенный тактовый генератор для работы с частотой 4 или 8 МГц; 18 пинов, из них 16 — ввод/вывод, а 2 — питание; для работы на более высоких частотах можно подключить кварцевый резонатор; Flash-память объемом 2048 слов; 4 аналоговых входа; два 8-битных таймера и один 16-битный; 224 байта ОЗУ (самому смешно); 128 байт EEPROM (это программно перезаписываемая энергонезависимая память, вроде жесткого диска); интерфейс UART.
Программирование и использование PIC
Программируют для микроконтроллеров, как правило, на ассемблере и на Си. Есть множество сред разработки: MPASM и MPLAB, MicroC, JALedit (язык JAL, сам про него впервые слышу).
![]()
WWW
Как правило, на таких МК собирают простенькие устройства вроде мигалки или таймера. Эти контроллеры долго имели монополию на постсоветском пространстве, и в результате в интернете есть огромное множество русскоязычных сервисов и статей, посвященных этим моделям МК. При сборке устройства часто можно даже не писать прошивку, ведь она легко находится в интернете, даже в нескольких вариантах.
Вторым плюсом можно указать встроенные независимые (от тактового генератора) счетчики. Благодаря этому факту семейство зарекомендовало себя в качестве «мозгов» для частотомеров. Пара таких контроллеров лежит у меня в мастерской на черный день. Из минусов можно выделить только высокую стоимость оригинальных программаторов, которые зовутся PICkit.

В интернете есть множество статей по сборке достойных аналогов таких программаторов. Но вся соль в том, что для сборки программатора тебе нужно что? Правильно, программатор. На этот случай был разработан программатор Громова. Для его сборки почти ничего не нужно, а работает он от COM-порта компьютера. На момент его разработки популярность этой серии МК была высока, да и COM-порты были у всех ПК. Сейчас все это уже редкость, так что придется преодолеть порог вхождения либо раскошелиться.
Продолжение доступно только участникам
Вариант 1. Присоединись к сообществу «Xakep.ru», чтобы читать все материалы на сайте
Членство в сообществе в течение указанного срока откроет тебе доступ ко ВСЕМ материалам «Хакера», позволит скачивать выпуски в PDF, отключит рекламу на сайте и увеличит личную накопительную скидку! Подробнее
Вариант 2. Открой один материал
Заинтересовала статья, но нет возможности стать членом клуба «Xakep.ru»? Тогда этот вариант для тебя! Обрати внимание: этот способ подходит только для статей, опубликованных более двух месяцев назад.