Где можно программировать сервомашинки emax
Благодарю! Да повелся на рекламу продавца и прикупил их аж 8 штук.
Теперь надо что-то делать )))
7 дней спустя
Похоже сгорел один регулятор Racerstar RS35A на гоночном квадрике. Причем как сгорел, не понятно. Летел и в полете навернулся на один бок неожиданно, видимо в полете остановился мотор. Заармил, мотор не крутиться. При этом этот мотор был слегка подбит (глубокая царапина на роторе) при прошлом падении на гравий. Решил сразу что мотор сгорел, т.к. на регуляторе ни дыма, ни запаха не было. Дома подпаял другой мотор (из другой серии) и он заработал. Т.е. мое предположение что сдох мотор подтвердилось. Заказал новый мотор, припаял его, и он тоже не работает. Думая ну может не повезло и прислали мертвый мотор, заменил опять на тот тестовый, мотор, он тоже уже не работает. Выходит что сдох все таки регулятор? В BLHeli Suite его видно, т.е. с контактом сигнального провода, плюса и минуса то же все в порядке, с контроллером регулятора тоже. Видимых оплавленностей радиодеталей то же не видно. В чем может быть проблема, как еще можно убедится что регулятор мертвый. Дело в том что таких регуляторов уже нет в продаже нигде, и заказывать все 4 штуки новых, еще и перебирать весь квадрик очень уж не хотелось бы, пока я на 100% не буду уверен что регулятор умер.
Сервоконтроллер на 16 серво для Arduino
Многоканальный сервоконтроллер Servo Controller Board 16 Channel USB предназначен для одновременного управления 16 сервоприводами и идеально подходит для постройки робота-гуманоида или робота-паука.
- Серво Контроллер RKP-SCB-16C имеет высокое разрешение (1 мкс) для точного позиционирования любой из 16 серво, что в результате делает все движения очень плавными и быстрыми.
- Диапазон скорости 0,50mS в 2,50 для диапазона угла вращения около 180 °.
- Управление движением серво может быть как с регулируемой постоянной запрограммированной скоростью, так и использовать комбинацию различных вариантов.
- Уникальная функция Перемещение группы серво» допускает любое количество (до 16) сервоприводов, чтобы одновременно начать и закончить движение, даже если сервоприводы должны поворачиваться на разные величины улов поворота.
- Положение штока сервопривода или его передвижения могут быть запрошены в любой момент времени для обеспечения обратной связи с главным управляющим компьютером. Любой из 16 выходов может быть использован как выходной уровень TTL.
- Восемь из шестнадцати каналов имеют дополнительную электронную систему защиты от перегрузки по току. Также на плате имеется 4 цифровых входа, которые являются статическими они также могут быть использованы в качестве аналоговых входов.
- На плате сервоконтроллера RKP-SCB-16C размещены дополнительные три клеммы питания, что позволяет размещать ее в любых движущихся роботах.
- Серво Контроллер для Arduino RKP-SCB-16C поддерживает наравне с интерфейсом USB и TTL-интерфейс, что позволяет легко подключать его к Вашему персональному компьютеру по шине USB, а также при использовании коммуникации UART (последовательный порт TTL) к любым микроконтроллерам MCU (Например: 51, AVR, ARM, FPGA, PIC и т.д.), чтобы непосредственно отправлять команды, для управления движением.
- Плата серво контроллера управляется микропроцессором ATmega168, благодаря чему появилась возможность выполнять как одновременные групповые команды, так и специальные наборы команд предназначенных для передвижения робота паука на шести ногах (12 Servo Hexapod).
Также Вы можете загрузить специальные инструкции в диспетчер мотора серво для выполнения любой офлайновой операции. - При использовании дистанционных систем управления (например джойстика: PS2) можно запрограммировать робота на выполнение большого количества различных сложных движений.
- Все коммутационные разъемы серво контроллера для Arduino RKP-SCB-16C строго стандартизованы и хорошо сочетаются с установкой любых сервоприводов стандартного размера таких фирм производителей как например: Spektrum, Parallax, Hitec и SpringRC, также поддерживаются и другие распространенные стандарты сервоприводов.
- Протокол управления серво контроллера совместим с контроллером Lynxmotion SSC32, а также с APC220 и модулем Bluetooth V3, которые могут быть подключены к плате серво контроллера RKP-SCB-16C, для непосредственного ручного управления роботом по беспроводной сети.
Характеристики сервоконтроллера RKP-SCB-16C:
— Микроконтроллер: ATmega168 (Atmel)
— Скорость обработки сигналов: 14,75 МГц
— Выходы: 16 каналов (Servo или TTL)
— Входы: 4 (статические или с фиксацией, аналоговые или цифровые)
— Питание серво: от 4,5V до 5,5V (DC)
— Выходные каналы: 16 (8 каналов имеют дополнительную защиту от перегрузки по току)
— Питание логической части платы: от 6,5V до 12V (DC) или от USB-источника питания ПК
— Потребляемый ток сервоконтроллера: примерно 30mA
— Диапазон хода серво: 180 °
— Высокое разрешение для точного позиционирования серво: 1 мкс, 0,09 °
— Величина скорости для серво: 1 мкс / Second при 0,09 °/ Second
— Коммуникационный интерфейс: USB / TTL последовательный интерфейс
— Последовательная скорость передачи: 9600, 19200, 28400, 57600, 115200, 128000 (скорость передачи информации в бодах определяется автоматически)
— Управление: в реальном времени, поддержка постоянного контроля скорости.
— Совместимость: совместим с «Lynxmotion the RIOS Arm Control» и «SEQ Visual Sequencer software»
— Флэш-память: Flash ROM 512 КБ (этот объем памяти позволяет сохранить более 500 команд для одновременной работы 16 серво)
— Поддержка Bluetooth и APC220 для беспроводной передачи данных и дистанционного управления роботом.
— Размеры платы: 55 x 40 мм
— Расстояние между центрами монтажных отверстий: 48 х 33 мм
— Диаметр отверстий для монтажа: 3 мм
— Вес: 16 гр.
Скачать программное обеспечение (софт) для программирования серво контроллера можно в статье «ПО для программирования сервоконтроллера на 16 и 32 серво =>
Сервопривод SG-5010 с повышенной мощностью


Сервопривод (сервомотор, серводвигатель, сервомашинка или просто «серво») — часто незаменимый элемент при конструировании всевозможных роботизированных манипуляторов. Например, такие моторы встречаются в моделях с поворачиваемой миниатюрной камерой или служат приводом, создающим движение ноги, руки или головы робота. Аналогичные серводвигатели можно обнаружить в игрушечных радиоуправляемых автомобилях, где они регулируют поворот передней пары колёс. Благодаря действительно малым габаритным размерам и весу, сервомашинка без особого труда поместиться даже в крыльях или хвостовой части самодельных авиамоделей. Вариантов применения таких сервомоторов достаточно много. Сервопривод обладает несложной однопроводной схемой взаимодействия над углами поворота вала. Поэтому, в качестве управляемого устройства подойдут платформы на основе микроконтроллеров ARM, AVR или PIC.
Характеристики
- Рабочее напряжение: 4.8-6.0 В (постоянное, DC)
- Рабочий ток: 100 — 600 мА
- Скорость реакции без нагрузки:
- 0.19 секунды / 60° (4.8 вольт)
- 0.15 секунды / 60° (6.0 вольт)
- 5.5 кг / см (4.8 вольт)
- 6.5 кг / см (6.0 вольт)
Конструкция сервомотора заключает в себе несколько электронных и механических элементов: обычный миниатюрный щеточный двигатель, снижающий скорость и увеличивающий крутящий момент редуктор, датчик положения вала редуктора в виде переменного резистора (потенциометра), и крохотной платы с микросхемой-контроллером. Все его составляющие части размещены в закрытом пластиковом корпусе.
Сервопривод отличается от обычных моторов возможностью повернуть вал на определённый заданный угол. Модель SG-5010 позволяет вращать вал редуктора в двух направлениях — по часовой или против часовой стрелке, в диапазоне от 0 до 170-180°. Точность позиционирования имеет погрешности и зависит от конкретного изделия. Встроенный аналоговый контроллер на микросхеме AA51880 определяет угол поворота по показаниям потенциометра B5K. В электрической цепи питания серво присутствуют cборки на полевых транзисторах MOSFET — TC4953 и 9926A.
Питание SG-5010
Рабочий ток сервомотора без нагрузки достаточно мал, примерно 100-300 мА. Однако, с увеличением нагрузки на вал вплоть до максимально возможной, а также при резкой смене направления вращения вала, увеличивается внутренняя нагрузка на электрическую цепь мотора, вследствии чего потребляемый ток может повышаться до пикового значения 600мА. Во избежании поломок генератора импульсов ШИМ, настоятельно рекомендуется не подключать положительный вывод питания сервопривода непосредственно к микроконтроллерной плате. Наилучшим вариантом станет использование внешнего источника питания.
Управление сервомотором SG-5010
Максимально возможный угол поворота вала редуктора ограничен свободным ходом пластикового ребра у одной из шестерёнок редуктора. Предельный угол перемещения составляет 200-216 °. При возможном достижении крайних угловых значений , ребро упирается и полностью блокирует вращение.
Управление сервомотором осуществляется сигналами широтно-импульсной модуляции (ШИМ). Из корпуса SG-5010 выходят три цветных провода, два из которых (коричневый «-» и красный «+») соединяются с внешним источником питания. Третий, оранжевый, подключается к непосредственно к контроллеру, генерирующему высокоуровневые импульсы переменной ширины.
Поворот вала мотора на заданный угол достигается изменением длины импульса. Интервал приёма между импульсами управления у модели SG-5010 составляет 20 миллисекунд.
Схема рекомендованного подключения сервопривода SG-5010 к Arduino
Потребуется следующие компоненты:
- Плата на контроллере Arduino — 1 шт
- Сервопривод SG-5010 — 1 шт
- Источник питания для Arduino 7-9 вольт -1 шт
- Источник питания для серво 4.8-6.0 вольт -1 шт
- Потенциометр 10 кОм -1 шт
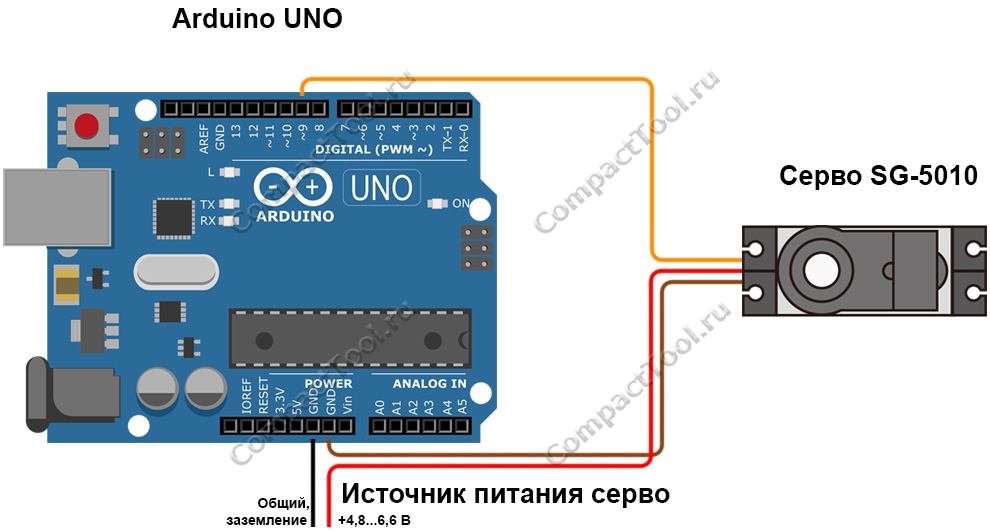
Источник питания постоянного напряжение 7-9 вольт соединяется с бочкообразным разъёмом входного напряжения на плате Arduino. Питание для контроллера можно подать на выводы «Vin» и «GND» с соблюдением полярности. «Минусовые» выводы мотора и платы-контроллера должны быть скоммутированы в одну общую линию. «Плюсовой» вывод мотора подключается к источнику питания постоянного напряжения 4.8-6.0 вольт.
Понимание о том, как же управлять сервомашинкой, приходит с опытом. В качестве примера воспользуйтесь простым программным кодом, написанным для среды разработчика Arduino IDE. Нижеприведённый скетч наглядно демонстрирует возможность поворота ротора мотора от 0 до 180 градусов и обратно в зацикленном режиме. Подключаемая в скетче библиотека Servo значительно облегчает процесс программирования. Текст скетча можно найти в обширной перечне примеров редактора Arduino IDE «Файл->Примеры->Servo->Sweep».
#include "Servo.h" Servo myservo; // создаем объект servo для управления сервомотором // двенадцать объектов servo могут быть создано на большинстве плат int pos = 0; // переменная, сохраняющая позицию сервомотора void setup() < myservo.attach(9); // управляющий вывод сервомотора подключен к 9 контакту платы >void loop() < for (pos = 0; pos for (pos = 180; pos >= 0; pos -= 1) < // угол поворота от 180 до 0 градусов // с шагов в 1 градус myservo.write(pos); // сообщаем сервомотору новую позицию // из переменной "pos" delay(15); // ожидаем синхронизацию положения сервомотора >>Поэкспериментируйте с вариантом посложнее, в котором управление поворотом ротора синхронизировано с вращением ручки внешнего потенциометра. Соединение Arduino-контроллера и потенциометра представлено на картинке ниже. Текст этого скетча также можно найти в списке примеров редактора Arduino IDE «Файл->Примеры->Servo->Knob».
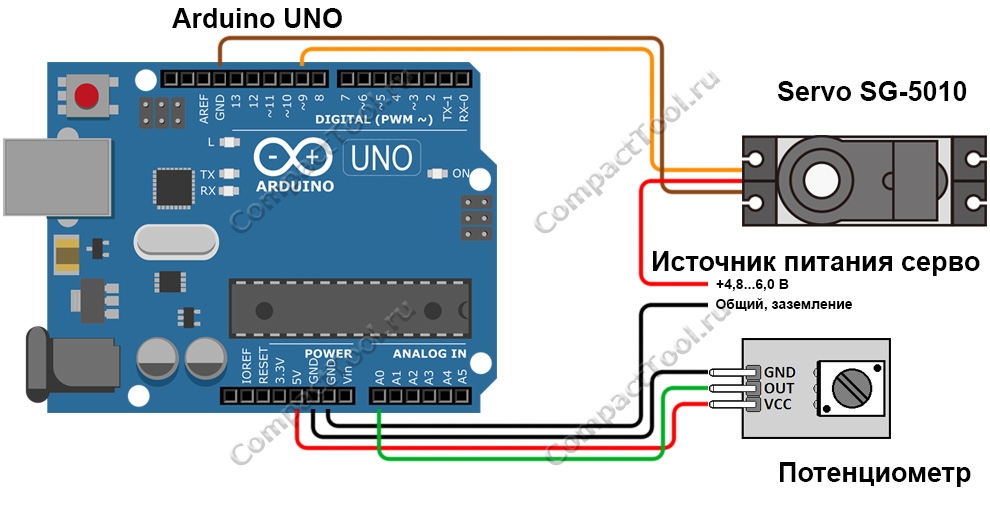
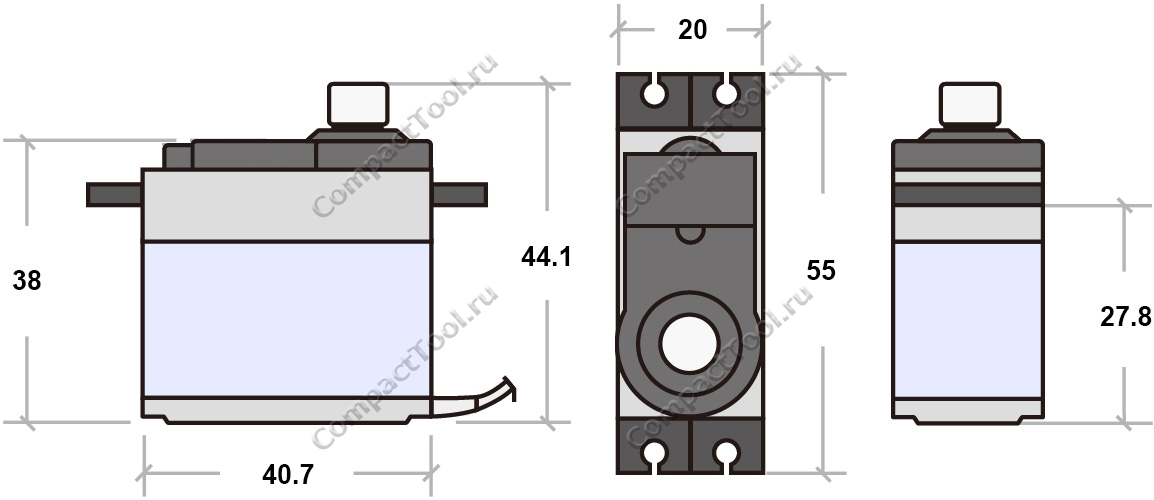
#include "Servo.h" Servo myservo; // создаем объект servo для управления сервомотором int potpin = 0; // аналоговый контакт подключен к потенциометру int val; // переменная, считывающая значения из аналогового контакта void setup() < myservo.attach(9); // управляющий вывод сервомотора подключен к 9 контакту платы >void loop() < val = analogRead(potpin); // считываем значения потенциометра (значения // между 0 и 1023) val = map(val, 0, 1023, 0, 180); // преобразовываем его в угол поворота вала // мотора (значения между 0 и 180) myservo.write(val); // передаём на мотор команду перемещения вала delay(15); // ожидаем синхронизацию сервомотора с новым // положением >Габаритные размеры, мм
EMAX
YINYAN Model Tech MFT. более известны под брендами EMAX (Емакс) и LOONG-MAX. Основные продукты компании: бесколлеторный двигатель, регулятор оборотов, винт для самолёта, сервомеханизм, зарядное устройство, зумер и множество комплектующих для авиамоделизма.
Качество — главный приоритет. Emax разрабатывает и производит все продукты, обеспечивая полный контроль качества на каждом этапе процесса разработки и производства продукции. Компания включает в себе совокупность современного дизайна, новые современные технологии вместе с конкурентоспособной ценой, шагая в ногу с постоянно развивающимся рынком.
Специальная группа высококвалифицированных инженеров и конструкторов тесно сотрудничают с производственным отделением на заводе, что позволяет совершенствовать продукцию и навыки персонала на всех стадиях производства.
Купить запчасти Емакс в Минске (Emax) можно в магаззине«Хобби Парк». Мы предоставляет гарантию и постгарантийное обслуживание на все комплектующие Emax купленные у нас.
Также став нашим клиентом, вы получите скидочную карточку для последующих выгодных покупок в сети магазинов «Хобби Парк».