Драйвер транзистора что это
Типы интегральных драйверов MOSFET и IGBT транзисторов
Интегральные драйверы – это специализированные микросхемы для управления MOSFET и IGBT транзисторами. На их входы поступают управляющие сигналы с ШИМ-контроллеров, а их выходные каскады обеспечивают большие импульсные токи (сотни миллиампер — единицы ампер), необходимые для быстрого переключения транзисторов из проводящего состояния в непроводящее и наоборот. То есть фактически они являются усилителями управляющих сигналов по току работающими в импульсном режиме. Это основная функция драйверов. Кроме этого интегральные драйверы могут также совмещать функции инверсии сигнала, обеспечения фазового сдвига, а также функции защиты силового ключа от перегрузки по току. Интегральные драйверы подразделяются в зависимости от топологии преобразователя и расположения ключа, которым они управляют на несколько типов [Современные высоковольтные драйверы MOSFET- и IGBT-транзисторов International Rectifier. Андрей Никитин. Электронные компоненты № 11, 2009. с. 67-71]:
— драйверы нижнего ключа (Low Side Drivers);
— драйверы верхнего ключа (High Side Drivers);
— драйверы полумостовой схемы (Half-Bridge Drivers);
— независимые драйверы верхнего и нижнего ключа совмещённые (High and Low SideDriver).
— изолированные драйверы с оптической развязкой;
— изолированные драйверы с трансформаторной развязкой.
Кроме этого существуют специализированные драйверы однофазного моста и драйверы трёхфазного моста, являющиеся комбинацией двух и трех полумостовых драйверов.
Драйверы нижнего ключа (Low Side Drivers)
Драйверы нижнего ключа используются для управления транзистором относительно уровня «земли». То есть когда исток MOSFET или эмиттер IGBT «сидит» на общей «земле» всей схемы. Это нижние ключи полумостовых и мостовых преобразователей, ключевые элементы обратноходовых (хотя драйверы там особо не нужны), прямоходовых преобразователей, повышающих и инвертирующих импульсных стабилизаторов. Это самые простые по конструкции внутреннего устройства драйверы, имеющие минимальные, по сравнению с другими классами проходные задержки на передачу сигнала от входа к выходу.
Внутренняя структура драйвера нижнего ключа представлена на рисунке GD.1. В общем случае драйвер нижнего ключа содержит: выходной каскад на MOSFET и/или биполярных транзисторах, предусилитель управляющий транзисторами выходного каскада и входной каскад (с возможной функцией гистерезиса по входному напряжению для повышения помехоустойчивости). В качестве примера на рисунке GD.1 представлена внутренняя структура драйверов нижнего ключа серии IR442х и UCC37ххх.
Драйверы верхнего ключа (High Side Drivers)
Драйверы верхнего ключа используются для управления транзистором относительно «плавающего» уровня. Как правило, исток MOSFET или эмиттер IGBT «сидит» на выходном «осциллирующем» уровне схемы преобразователя. Это верхние ключи полумостовых и мостовых преобразователей, ключевые элементы понижающих стабилизаторов (типа чоппер), ключи корректоров коэффициента мощности, верхние ключи косых полумостов и т.д.
Драйверы верхнего ключа обязательно содержит в своем составе схему сдвига уровня. Это обусловлено тем, что управляющие импульсы подаются на вход относительно уровня «земли», а выходной каскад драйвера подключен к плавающему уровню. То есть необходимо транслировать управление снизу вверх. Схема сдвига уровня вносит дополнительные задержки и поэтому временные задержки у драйверов верхнего ключа выше, чем у драйверов нижнего ключа. Драйверы верхнего ключа имеют два входа для напряжения питания: одно для питания входного каскада и схемы сдвига уровня, другое для питания выходного каскада.
Внутренняя структура драйвера верхнего ключа представлена на рисунке GD.2:
В общем случае драйвер нижнего ключа содержит: выходной каскад на MOSFETтранзисторах, предусилитель управляющий транзисторами выходного каскада, схема сдвига уровня и входной каскад (с возможной функцией гистерезиса по входному напряжению для повышения помехоустойчивости). Кроме этого стандартом «де факто» является блок защиты от пониженного напряжения питания выходного каскада.
Независимые драйверы верхнего и нижнего ключа совмещённые (
High and LowSide Driver)
Для управления полумостовыми и мостовыми преобразователями удобно использовать драйверы, совмещающие в одном корпусе драйверы верхнего и нижнего ключей. В общем случае совмещенные драйверы содержат в своем составе драйвер верхнего ключа, драйвер нижнего ключа, схемы сдвига уровня и схемы временной задержки (та самая, которая формирует deadtime) – рисунок GD.3. Кроме этого совмещенные драйверы содержат, как правило, вход стробирования, отключающий оба драйвера. Входы для управления верхним и нижним каналами могут быть как совмещенными в одном, так и раздельными.
Драйверы полумоста (Half-bridge Driver)
Для управления полумостовыми и мостовыми преобразователями удобно использовать специализированные драйверы, совмещающие в одном корпусе драйверы нижнего и верхнего ключей. Драйверы содержат в своем составе драйвер верхнего ключа, драйвер нижнего ключа, схемы сдвига уровня и схемы временной задержки (та самая, которая формирует deadtime) – рисунок GD.4. Кроме этого драйверы содержат, как правило, вход стробирования, отключающий оба драйвера. Входы для управления верхним и нижним каналами могут быть как совмещенными в одном, так и раздельными.
Изолированные оптические драйверы силовых ключей
При необходимости полной гальванической развязки при управлении силовым ключом используют специализированные оптические драйверы силовых ключей. Оптодрайвер содержит в своем составе быстродействующий оптрон и собственно драйвер с мощным выходным каскадом. Ключевыми преимуществами является возможность полной гальванической развязки, что важно в случае исток MOSFET (эмиттер IGBT) управляемого транзистора «плавает» в широких пределах. Это обеспечивает некоторую независимость силовой цепи от цепи от цепи управления и повышает ремонтопригодность в случае критических проблем в силовой части. Недостатками являются существенно большие временные задержки, по сравнению с неизолированными драйверами (сотни наносекунд по сравнению с десятками) и необходимость обеспечения питания силовой части драйвера с помощью отдельного гальваноразвязанного маломощного источника напряжения. В качестве последнего могут быть использованы дешевые flyback-преобразователи или низкочастотные трансформаторы с выпрямителем и стабилизатором. Представленные преимущества и недостатки определяют основную область использования оптических драйверов – управление IGBT-транзисторами на небольших частотах – до 20-50 кГц.
При необходимости специальных применений можно использовать совмещение быстродействующей оптопары (предназначенной для использования в волоконных линиях связи) и обычного драйвера нижнего ключа.
Основные параметры интегральных драйверов:
Основные параметры интегральных драйверов представлены в таблице GD.1.
Таблица GD.1 — Основные параметры интегральных драйверов
| № | Обозначение | Наименование | ENG-наименование | Описание |
| 1 | IO+ | Максимальный «вытекающий» ток драйвера | Output high short circuit pulsed current | Ток выходного каскада драйвера во включенном состоянии при условии короткого замыкания на выходе |
| 2 | IO- | Максимальный «втекающий» ток драйвера | Output low short circuit pulsed current | Ток выходного каскада драйвера в включенном состоянии при условии что на выходе драйвера уровень напряжения питания |
| 3 | VS | Максимальное напряжение питания драйвера | Fixed supply voltage | Максимальная величина напряжения питания драйвера |
| 4 | VO | Максимальное выходное напряжение драйвера | Output voltage | Максимальная величина напряжения на выходе драйвера (связана с входным напряжением) |
| 5 | PD | Максимальная рассеиваемая мощность | Package power dissipation | Максимальная мощность, рассеваемая корпусом драйвера |
| 6 | VIH | Пороговое напряжение логической единицы | Logic “1” input voltage | Пороговый уровень входного напряжения выше которого драйвер переходит в состояние «включено» |
| 7 | VIL | Пороговое напряжение логического нуля | Logic “0” input voltage | Пороговый уровень входного напряжения ниже которого драйвер переходит в состояние «выключено». При отсутствии гистерезиса по входу VIH = VIL = VIN_H (logic 1 input threshold) |
| 8 | IIN+ | Входной ток управляющего сигнала в состоянии включено | Logic “1” input bias current (OUT=HI) | Максимальный уровень входного тока входа управления в состоянии «включено» |
| 9 | IIN- | Выходной ток управляющего сигнала в состоянии включено | Logic “0” input bias current (OUT=LO) | Максимальный уровень выходного тока входа управления в состоянии «выключено» |
| 10 | IQS | Ток покоя драйвера | Quiescent Vs supply current | Ток собственного потребления интегрального драйвера |
| 11 | td1 | Задержка передачи сигнала включения | Turn-on propagation delay | Время от перехода входным сигналом порогового уровня до начала нарастания (10% или 20% от уровня) напряжения на выходе драйвера |
| 12 | td2 | Задержка передачи сигнала выключения | Turn-off propagation delay | Время от перехода входным сигналом порогового уровня до начала спада (90% или 80% от уровня) напряжения на выходе драйвера |
| 13 | tr | Длительность фронта нарастания импульса | Turn-on rise time | Время нарастания напряжения на выходе драйвера от 10% или 20% до 90 % или 80% от максимума |
| 14 | tf | Длительность фронта спада импульса | Turn-off fall time | Время спада напряжения на выходе драйвера от 90% или 80% до 10 % или 20% от максимума |
Дополнительные функции драйверов:
Для драйверов верхнего ключа, а также совмещённых и полумостовых драйверов кроме перечисленных существует ряд дополнительных параметров:
Таблица GD.2 Специфические параметры совмещённых и полумостовых драйверов интегральных драйверов
| № | Обозначение | Наименование | ENG-наименование | Описание |
| 1 | VB | Максимальное напряжение смещения питания выходного каскада | High Side Floating Supply Voltage | Максимальное напряжение между уровнем напряжения питания выходного каскада с «плавающим» потенциалом и уровнем «земли» |
| 2 | VS | Максимальное напряжение смещения | High Side Floating Offset Voltage | Максимальное напряжение между нижним уровнем выходного каскада (исток или эмиттер верхнего транзистора), средняя точка полумоста и «землей» |
| 3 | dVs/dt | Максимальная скорость нарастания напряжения на плавающем электроде | Allowable Offset Supply Voltage Transient | Максимальное значение скорости нарастания напряжения на плавающем электроде. При превышении это скорости возможно паразитное открывание драйвера и сквозной ток в силовой части. |
| 4 | VS_neg | Максимальное отрицательное напряжение плавающего потенциала | Maximum VS Negative Offset | Максимальная величина отрицательного напряжения плавающего потенциала относительно уровня «земли». Этот параметр характеризует стойкость микросхемы к защелкиванию, которая возникает при работе на индуктивную нагрузку. Чем больше тем лучше. Обычно указывается в справочных листках в формате графика зависимости от напряжения питания выходного каскада (Maximum VS Negative Offset vs. Supply Voltage). |
Дополнительные функции драйверов
— Дифференциальные входы. Иногда входы драйверов делают дифференциальными с целью увеличения возможностей управления (важно для контроллеров моторов).
— Блокировка при уменьшении напряжения питания ниже порогового уровня (UVLO — Under Voltage Lock-Out threshold). Пониженное напряжение питания выходного каскада может привести к росту динамических потерь или его переходу в активный режим, что вызовет быстрый выход его из строя.
— Защита от короткого замыкания. Суть защиты заключается в непрерывном контроле тока истока MOSFET (или эмиттера у IGBT) либо путем использования низкоиндуктивных шунтов, включающихся в цепь истока (эмиттера), либо путем контроля напряжения на открытом ключе. Драйвер с функцией защиты от короткого замыкания с использованием шунта содержит вход контроля тока и внутренний компаратор, аварийно выключающий ключ при превышении током установленного значения. Если контроль короткого замыкания осуществляется по напряжению на стоке (коллекторе), то драйвер содержит дополнительный вывод, соединяемый как правило через диод со стоком (коллектором) и аналогичную компараторную схему, аварийно выключающую силовой ключ [Драйверы силовых ключей. Георгий Волович. СОВРЕМЕННАЯ ЭЛЕКТРОНИКА. № 8. 2007. с. 32-40].
— Формирование временной задержки. Для предотвращения возможных сквозных токов драйверах полумостовых схем может присутствовать функция формирования временной задержки между каналами управления верхнего и нижнего ключей (рисунок GD.5). Задержка нужна для того чтобы дать одному из ключей выключится прежде чем начнет включаться второй. Длительностью задержки, как правило, можно управлять.
Особенности применения драйверов MOSFET и IGBT Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
Аннотация научной статьи по электротехнике, электронной технике, информационным технологиям, автор научной работы — Колпаков Андрей
Силовые транзисторы IGBT и MOSFET стали основными элементами, применяемыми в мощных импульсных преобразователях. Их уникальные статические и динамические характеристики позволяют создавать устройства, способные отдать в нагрузку десятки и даже сотни киловатт при минимальных габаритах и КПД, превышающем 95 %.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по электротехнике, электронной технике, информационным технологиям , автор научной работы — Колпаков Андрей
Характеристики и особенности применения драйверов MOSFET и IGBT
Схемотехнические способы борьбы с защелкиванием в каскадах с IGBT транзисторами
Современные микросхемы Infineon и Shindengen для импульсных источников питания
Защитные функции драйверов SEMIKRON
MiniSKiiP IPM — инструкция по эксплуатации
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Текст научной работы на тему «Особенности применения драйверов MOSFET и IGBT»
Особенности применения драйверов MOSFET и IGBT
Силовые транзисторы IGBT и MOSFET стали основными элементами, применяемыми в мощных импульсных преобразователях. Их уникальные статические и динамические характеристики позволяют создавать устройства, способные отдать в нагрузку десятки и даже сотни киловатт при минимальных габаритах и КПД, превышающем 95 %.
Общим у IGBT и MOSFET является изолированный затвор, в результате чего эти элементы имеют схожие характеристики управления. Благодаря отрицательному температурному коэффициенту тока короткого замыкания появилась возможность создавать транзисторы, устойчивые к короткому замыканию. Сейчас транзисторы с нормированным временем перегрузки по току выпускаются практически всеми ведущими фирмами.
Отсутствие тока управления в статических режимах позволяет отказаться от схем управления на дискретных элементах и создать интегральные схемы управления — драйверы. В настоящее время ряд фирм, таких как International Rectifier, Hewlett-Packard, Motorola, выпускает широкую гамму устройств, управляющих одиночными транзисторами, полумостами и мостами — двух- и трехфазными. Кроме обеспечения тока затвора, они способны выполнять и ряд вспомогательных функций, таких как защита от перегрузки по току и короткого замыкания (Overcurrent Protection, Short Circuit Protection) и падения напряжения управления (Under Voltage LockOut — UVLO). Для ключевых элементов с уп-
равляющим затвором падение напряжения управления является опасным состоянием. При этом транзистор может перейти в линейный режим и выйти из строя из-за перегрева кристалла.
Пользователям бывает нелегко разобраться в широкой гамме микросхем, выпускаемых сейчас для использования в силовых схемах, несмотря на схожесть их основных характеристик. В данной статье рассматриваются особенности использования наиболее популярных драйверов, выпускаемых различными фирмами.
Режимы короткого замыкания
Основной вспомогательной функцией драйверов является защита от перегрузки по току. Для лучшего понимания работы схемы защиты необходимо проанализировать поведение силовых транзисторов в режиме короткого замыкания (или КЗ — привычная для разработчиков аббревиатура).
Причины возникновения токовых перегрузок разнообразны. Чаще всего это аварийные случаи, такие как пробой на корпус или замыкание нагрузки.
Перегрузка может быть вызвана и особенностями схемы, например переходным процессом или током обратного восстановления диода оппозитного плеча. Такие перегрузки должны быть устранены схемотехническими методами: применением цепей формирования траектории (снабберов), выбором резистора затвора, изоляцией цепей управления от силовых шин и др.
при коротком замыкании в цепи нагрузки
Принципиальная схема и эпюры напряжения, соответствующие этому режиму, приведены на рис. 1 а и 2. Все графики получены при анализе схем с помощью программы PSpice. Для анализа были использованы усовершенствованные модели транзисторов MOSFET фирмы International Rectifier и макромодели IGBT и драйверов, разработанные автором статьи.
Максимальный ток в цепи коллектора транзистора ограничен напряжением на затворе и крутизной транзистора. Из-за наличия емкости в цепи питания внутреннее сопротивление источника питания не влияет на ток КЗ. В момент включения ток в транзисторе нарастает плавно из-за паразитной индуктивности LS в цепи коллектора (средний график на рис. 2). По этой же причине напряжение имеет провал (нижний график). После окончания переходного процесса к транзистору приложено полное напряжение питания, что приводит к рассеянию огромной
мощности в кристалле. Режим КЗ необходимо прервать через некоторое время, необходимое для исключения ложного срабатывания. Это время обычно составляет 1-10 мкс. Естественно, что транзистор должен выдерживать перегрузку в течение этого времени.
Короткое замыкание нагрузки
у включенного транзистора
Принципиальная схема и эпюры напряжения, соответствующие этому режиму, приведены на рис. 1 б и 3. Как видно из графиков, процессы в этом случае происходят несколько иначе. Ток, как и в предыдущем случае, ограниченный параметрами транзистора, нарастает со скоростью, определяемой паразитной индуктивностью Ls (средний график на рис. 3). Прежде чем ток достигнет установившегося значения, начинается рост напряжения Vce (нижний график). Напряжение на затворе возрастает за счет эффекта Миллера (верхний график). Соответственно возрастает и ток коллектора, который может превысить установившееся значение. В этом режиме кроме отключения транзистора необходимо предусмотреть и ограничение напряжения на затворе.
Как было отмечено, установившееся значение тока КЗ определяется напряжением на затворе. Однако уменьшение этого напряжения приводит к повышению напряжения насыщения и, следовательно, к увеличению потерь проводимости. Устойчивость к КЗ тесно связана и с крутизной транзистора. Транзисторы IGBT с высоким коэффициентом усиления по току имеют низкое напряжение насыщения, но небольшое допустимое время перегрузки. Как правило, транзисторы, наиболее устойчивые к КЗ, имеют высокое напряжение насыщения и, следовательно, высокие потери.
Допустимый ток КЗ у IGBT гораздо выше, чем у биполярного транзистора. Обычно он равен 10-кратному номинальному току при допустимых напряжениях на затворе. Ведущие фирмы, такие как International Rectifier, Siemens, Fuji, выпускают транзисторы, выдерживающие без повреждения подобные перегрузки. Этот параметр оговаривается в справочных данных на транзисторы и называется Short Circuit Ration, а допустимое время перегрузки — tsc — Short Circuit Withstand Time.
Быстрая реакция схемы защиты вообще полезна для большинства применений. Использование таких схем в сочетании с высокоэконо-
мичными IGBT повышают эффективность работы схемы без снижения надежности.
Применение драйверов для защиты от перегрузок
Рассмотрим методы отключения транзисторов в режиме перегрузки на примере драйверов производства фирм International Rectifier, Motorola и Hewlett-Packard, так как эти микросхемы позволяют реализовать функции защиты наиболее полно.
Драйвер верхнего плеча
На рис. 4 приведена структурная схема, а на рис. 5 — типовая схема подключения драйвера IR2125 с использованием функции защиты от перегрузки. Для этой цели используется вывод 6 — CS. Напряжение срабатывания защиты — 230 мВ. Для измерения тока в эмиттере установлен резистор RSENSE, номинал которого и делителя R1, R4 определяют ток защиты.
Как было указано выше, если при появлении перегрузки уменьшить напряжение на затворе, период распознавания аварийного режима может быть увеличен. Это необходимо для исключения ложных срабатываний. Данная функция реализована в микросхеме IR2125. Конденсатор С1, подключенный к выводу ERR, определяет время анализа состояния перегрузки. При С1 = 300 пФ время анализа составляет около 10 мкс (это время заряда конденсатора до напряжения 1,8 В — порогового напряжения компаратора схемы ERROR TIMING драйвера). На это время включается схема стабилизации тока коллектора, и напряжение на затворе снижается. Если состояние перегрузки не прекращается, то через 10 мкс транзистор отключается полностью.
Отключение защиты происходит при снятии входного сигнала, что позволяет пользователю организовать триггерную схему защиты. При ее использовании особое внимание следует уделить выбору времени повторного включения, которое должно быть больше тепловой постоянной времени кристалла силового транзистора. Тепловая постоянная времени может быть определена по графику теплового импеданса Zthjc для одиночных импульсов.
Описанный способ включения транзистора имеет свои недостатки. Резистор RSENSE должен быть достаточно мощным и иметь сверхма-
Рис. 4. Структура драйвера IR2125
Рис. 5. Схема включения IR2125
лую индуктивность. Серийно выпускаемые витые мощные резисторы обычно имеют недопустимо высокую паразитную индуктивность. Специально для прецизионного измерения импульсных токов фирма CADDOCK выпускает резисторы в корпусах Т0-220 и ТО-247. Кроме того, измерительный резистор создает дополнительные потери мощности, что снижает эффективность схемы. На рис. 6 приведена схема, свободная от указанных недостатков. В ней для анализа ситуации перегрузки используется зависимость напряжения насыщения от тока коллектора. Для MOSFET транзисторов эта зависимость практически линейна, так как сопротивление открытого канала мало зависит от тока стока. У IGBT график Von = f(Ic) нелинеен, однако точность его вполне достаточна для выбора напряжения, соответствующего току требуемому защиты.
Для анализа состояния перегрузки по напряжению насыщения измерительный резистор не требуется. При подаче положительного управляющего сигнала на затвор на входе защиты драйвера SC появляется напряжение, определяемое суммой падения напряжения на открытом диоде VD2 и на открытом силовом транзисторе Q1 и делителем R1, R4, который задает ток срабатывания. Падение напряжения на диоде практически неизменно и составляет около 0,5 В. Напряжение открытого транзистора при выбранном токе короткого замыкания определяется из графика Von = f(Ic). Диод VD4, как и VD1, должен быть быстродействующим и высоковольтным.
Кроме защиты от перегрузки по току драйвер анализирует напряжение питания входной части VCC и выходного каскада VB, отключая транзистор при падении VB ниже 9 В, что необходимо для предотвращения линейного режима работы транзистора. Такая ситуация может
Рис. 7. Схема включения IR2130
возникнуть как при повреждении низковольтного источника питания, так и при неправильном выборе емкости С2. Величина последней должна вычисляться исходя из значений заряда затвора, тока затвора и частоты следования импульсов. Для расчета значения бутстрепной емкости Cb в документации фирмы International Rectifier рекомендуются следующие формулы:
Cb = 15*2*(2*Qg + Igbs/f + It)/(Vcc — Vf — Vls),
It = (Ion + Ioff)*tw.
Ion и Ioff — токи включения и выключения затвора, tw = Qg/Ion — время коммутации,
Qg — заряд затвора, f — частота следования импульсов,
Vcc — напряжение питания,
Vf — прямое падение напряжения на диоде зарядового насоса (VD1 на рис. 6),
Vls — прямое падение напряжения на оппозитном диоде (VD3 на рис. 6),
Igbs — ток затвора в статическом режиме.
При невозможности питания драйвера от бутстрепной емкости необходимо использовать «плавающий» источник питания.
Драйвер трехфазного моста
На рис. 7 приведена схема подключения драйвера трехфазного моста IR213* с использованием функции защиты от перегрузки. Для этой цели используется вход ITR. Напряжение срабатывания защиты — 500 мВ. Для измерения полного тока моста в эмиттерах установ-
Vrr Desat/ Foult СС Blank
lnPut VEE Gnd 3
Рис. 8. Структурная схема МС33153
Рис. 9. Защита по напряжению насыщения
лен резистор RSENSE, номинал которого вместе с делителем R2, R3 определяет ток защиты.
Драйвер IR2130 обеспечивает управление MOSFET и IGBT транзисторами при напряжении до 600 В, имеет защиту от перегрузки по току и от снижения питающих напряжений. Схема защиты содержит полевой транзистор с открытым стоком для индикации неисправности (FAULT). Он также имеет встроенный усилитель тока нагрузки, что позволяет вырабатывать контрольные сигналы и сигналы обратной связи. Драйвер формирует время задержки (tdt — deadtime) между включением транзисторов верхнего и нижнего плеча для исключения сквозных токов. Это время составляет от 0,2 до 2 мкс для различных модификаций.
Для правильного использования указанной микросхемы и создания на ее основе надежных схем надо учитывать несколько нюансов.
Особенностью драйверов IR213* является отсутствие функции ограничения напряжения на затворе при КЗ. По этой причине постоянная времени цепочки R1C1, предназначенной для задержки включения защиты, не должна превышать 1 мкс. Разработчик должен знать, что отключение моста произойдет через 1 мкс после возникновения КЗ, в результате чего ток (особенно при активной нагрузке) может превысить расчетное значение. Для сброса защиты необходимо отключить питание драйвера или подать на входы нижнего уровня запирающее напряжение (высокого уровня). Отметим также, что среди микросхем данной серии имеется драйвер IR2137, в котором предусмотрена защита по напряжению насыщения верхних транзисторов и формируется необходимое время задержки срабатывания этой защиты. Такая защита очень важна для драйверов, управляющих трехфазными мостовыми схемами, так как при возникновении пробоя на корпус ток КЗ течет, минуя измерительный резистор RSENSE. В этой микросхеме предусмотрено раздельное подключение резисторов затвора для включения, отключения и аварийного выключения, что позволяет реализовать наиболее полно все динамические особенности транзисторов с изолированным затвором.
Ток включения/выключения для IR213* составляет 200/420 мА (120/250 мА для IR2136). Это необходимо учитывать при выборе си-
ловых транзисторов и резисторов затвора для них. В параметрах на транзистор указывается величина заряда затвора (обычно в нК), которая определяет при данном токе время включения/выключения транзистора. Длительность переходных процессов, связанных с переключением, должна быть меньше времени задержки tdt, формируемого драйвером. Применение мощных транзисторов может также привести к ложному открыванию и возникновению сквозного тока из-за эффекта Миллера. Уменьшение резистора затвора или использование резисторов затвора, раздельных для процессов включения и выключения, не всегда решает проблему вследствие недостаточного тока выключения самого драйвера. В этом случае необходимо использование буферных усилителей.
Преимуществом микросхем производства International Rectifier является то, что эти устройства способны выдерживать высокие перепады напряжения между входной и выходной частью. Для драйверов серии IR21** это напряжение составляет 500-600 В, что позволяет управлять транзисторами в полумостовых и мостовых схемах при питании от выпрямленного промышленного напряжения 220 В без гальванической развязки. Для управления транзисторами в схемах, рассчитанных на питание от выпрямленного напряжения 380 В, International Rectifier выпускает драйверы серии IR22**. Эти микросхемы работают при напряжении выходной части до 1200 В. Все драйверы International Rectifier выдерживают фронты наведенного напряжения до 50 В/нс. Этот параметр называется dv/dt immune. Он свидетельствует о высокой устойчивости к режиму защелкивания, который представляет исключительную опасность для импульсных высоковольтных схем.
Драйвер нижнего плеча
Для управления транзисторами нижнего плеча хорошую альтернативу представляют микросхемы, выпускаемые фирмой Motorola.
Рис. 13. Схема включения IR2171
Структурная схема одной из них — МС33153 приведена на рис. 8.
Особенностью данного драйвера является возможность использования двух способов защиты (по току и напряжению насыщения) и разделение режима перегрузки и режима короткого замыкания. Предусмотрена также возможность подачи отрицательного напряжения управления, что может быть очень полезно для управления мощными модулями с большими значениями заряда затвора. Отключение при падении напряжения управления — UVLO осуществляется на уровне 11В.
Вывод 1 (Current Sense Input) предназначен для подключения токового измерительного резистора. В микросхеме этот вывод является входом двух компараторов — с напряжением срабатывания 65 и 130 мВ. Таким образом, в драйвере анализируется состояние перегрузки и короткого замыкания. При перегрузке срабатывает первый компаратор (Overcurrent Comparator) и отключает сигнал управления затвором. Сброс защиты производится при подаче запирающего сигнала (высокого уровня, так как вход Input — инвертирующий). При этом сигнал неисправности на выход (Fault Output) не подается. Если ток превышает заданный в два раза, это расценивается как КЗ. При этом опрокидывается второй компаратор (Short Circuit Comparator), и на контрольном выходе появляется сигнал высокого уровня. По этому сигналу контроллер, управляющий работой схемы, должен произвести отключение всей схемы. Время повторного включения должно определяться, как было сказано выше, тепловой постоянной времени силовых транзисторов.
Вывод 8 (Desaturation Input) предназначен для реализации защиты по напряжению насыщения. Напряжение срабатывания по этому входу — 6,5 В. Этот же вход предназначен для подключения конденсатора Cblank, формирующего время задержки срабатывания защиты. Такая задержка необходима, поскольку после подачи отпирающего напряжения на затвор на транзисторе некоторое время, пока идет восстановление оппозитного диода, поддерживается высокое напряжение.
На рис. 9 и 10 показаны схемы подключения МС33153 с использованием защиты по напряжению насыщения и току коллектора. В обеих схемах использованы оптопары для развязки сигнала управления и сигнала
ошибки. В схеме на рис. 10 показан транзистор IGBT со специальным токовым выходом. Как правило, IGBT не имеют такого вывода, и измерительный резистор устанавливается непосредственно в силовую цепь эмиттера. При этом необходимо учесть, что этот резистор должен иметь минимальную паразитную индуктивность, а номинал его должен быть выбран с учетом необходимого тока срабатывания защиты. Иногда в качестве датчика тока целесообразно применить отрезок высокоомного провода, например манганинового или нихромового. Обратите внимание, что порог срабатывания схем защиты микросхем Motorola ниже, чем International Rectifier, что позволяет использовать меньшие измерительные резисторы и снизить потери мощности на них. Однако в этом случае предъявляются повышенные требования к помехозащищенности.
Драйвер с гальванической развязкой
Гальваническая развязка бывает необходима в схемах, где мощный силовой каскад питается от сетевого напряжения, а сигналы управления вырабатываются контроллером, связанным по шинам с различными периферийными устройствами. Изоляция силовой части и схемы управления в таких случаях снижает коммутационные помехи и позволяет в экстремальных случаях защитить низковольтные схемы.
На наш взгляд, одной из наиболее интересных микросхем для данного применения является HCPL316 производства фирмы Hewlett-Packard. Его структура приведена на рис. 11, а схема подключения — на рис. 12.
Сигнал управления и сигнал неисправности имеют оптическую развязку. Напряжение изоляции — до 1500 В. В драйвере предусмотрена защита только по напряжению насыщения (вывод 14 — DESAT). Интересной особенностью является наличие прямого и инверсного входа, что упрощает связь с различными типами контроллеров. Так же как и в случае с МС33153 микросхема может вырабатывать двуполярный выходной сигнал, причем пиковый выходной ток может достигать 3 А. Благодаря этому драйвер способен управлять IGBT транзисторами с током коллектора до 150 А, что является его большим преимуществом по сравнению с аналогичными устройствами.
В высоковольтных драйверах фирмы International Rectifier благодаря низкому потреб-
лению питание выходных каскадов может осуществляться с помощью так называемых «бутстрепных» емкостей небольших номиналов. Если такой возможности нет, необходимо использовать «плавающие» источники питания. В качестве таких источников дешевле всего применять многообмоточные трансформаторы с выпрямителем и стабилизатором на каждой обмотке. Естественно, если вы хотите иметь двуполярный выходной сигнал, то и каждый такой источник должен быть двуполярным. Однако более изящным решением является использование изолирующих DC-DC конверторов, например серии DCP01* производства Burr-Brown. Эти микросхемы рассчитаны на мощность до 1Вт и могут формировать двуполярный выходной сигнал из однополярного входного. Напряжение развязки — до 1 кВ. Изоляция осуществляется с помощью трансформаторного барьера на частоте 800 кГц. При использовании нескольких микросхем они могут синхронизироваться по частоте.
В силовых приводах часто бывает необходимо иметь сигнал, пропорциональный выходному току, для формирования обратных связей. Эта задача решается разными способами: с помощью трансформаторов тока, шунтов и дифференциальных усилителей и т. д. Все эти методы имеют свои недостатки. Для наиболее успешного решения задачи формирования токового сигнала и связи его с контроллером фирма International Rectifier разработала микросхемы — токовые сенсоры IR2171 и IR2172, в которых токовый сигнал преобразуется в ШИМ-сигнал. Схема включения IR2171 приведена на рис. 13. Микросхема выдерживает перепад напряжения до 600 В и питается от «бутстрепной» емкости. Несущая частота ШИМ — 35 кГц для IR2171 и 40 кГц для IR2172. Диапазон входных напряжений ±300 мВ. Выходное напряжение снимается с открытого коллектора, что позволяет легко подключить оптическую развязку.
Описать все микросхемы, выпускаемые сейчас в мире для использования в силовых приводах, вряд ли возможно. Однако даже приведенные сведения должны помочь разработчику сориентироваться в океане современной элементной базы. Главный вывод из всего сказанного можно сделать следующий: не пытайтесь сделать что-нибудь на дискретных элементах, пока не будете уверены в том, что никто не выпускает интегральную микросхему, решающую вашу задачу.
1. Use Gate Charge to Design the Gate Drive Circuit for Power MOSFETs and IGBTs. AN-944.
2. Application Characterization of IGBTs. INT990.
3. IGBT Characteristics. AN-983.
4. Short Circuit Protection. AN-984.
5. HV Floating MOS-Gate Driver Ics. AN-978.
6. Motorola MC33153 Technical Data.
7. Hewlett Packard HCPL316 Technical Data.
8. Burr Brown DCP011515 Technical Data.
Использование драйвера ключей нижнего и верхнего уровней IR2110 — объяснение и примеры схем

Во-первых, в данном переводе могут быть серьёзные проблемы с переводом терминов, я не занимался электротехникой и схемотехникой достаточно, но всё же что-то знаю; также я пытался перевести всё максимально понятно, поэтому не использовал такие понятия, как бутсрепный, МОП-транзистор и т.п. Во-вторых, если орфографически сейчас уже сложно сделать ошибку (хвала текстовым процессорам с указанием ошибок), то ошибку в пунктуации сделать довольно-таки просто.
И вот по этим двум пунктам прошу пинать меня в комментариях как можно сильнее.
Теперь поговорим уже больше о теме статьи — при всём многообразии статей о построении различных транспортных средств наземного вида (машинок) на МК, на Arduino, на , само проектирование схемы, а тем более схемы подключения двигателя не описывается достаточно подробно. Обычно это выглядит так:
— берём двигатель
— берём компоненты
— подсоединяем компоненты и двигатель
— …
— PROFIT!1!
Но для построения более сложных схем, чем для простого кручения моторчика с ШИМ в одну сторону через L239x, обычно требуется знание о полных мостах (или H-мостах), о полевых транзисторах (или MOSFET), ну и о драйверах для них. Если ничто не ограничивает, то можно использовать для полного моста p-канальные и n-канальные транзисторы, но если двигатель достаточно мощный, то p-канальные транзисторы придётся сначала обвешивать большим количеством радиаторов, потом добавлять кулеры, ну а если совсем их жалко выкидывать, то можно попробовать и другие виды охлаждения, либо просто использовать в схеме лишь n-канальные транзисторы. Но с n-канальными транзисторами есть небольшая проблема — открыть их «по-хорошему» подчас бывает довольно сложно.
Поэтому я искал что-нибудь, что мне поможет с составлением правильной схемы, и я нашёл статью в блоге одного молодого человека, которого зовут Syed Tahmid Mahbub. Этой статьёй я и решил поделится.
Во многих ситуациях мы должны использовать полевые транзисторы как ключи верхнего уровня. Также во многих ситуациях мы должны использовать полевые транзисторы как ключи как и верхнего, так и нижнего уровней. Например, в мостовых схемах. В неполных мостовых схемах у нас есть 1 MOSFET верхнего уровня и 1 MOSFET нижнего уровня. В полных мостовых схемах мы имеем 2 MOSFETа верхнего уровня и 2 MOSFETа нижнего уровня. В таких ситуациях нам понадобится использовать драйвера как высокого, так и низкого уровней вместе. Наиболее распространённым способом управления полевыми транзисторами в таких случаях является использование драйвера ключей нижнего и верхнего уровней для MOSFET. Несомненно, самым популярным микросхемой-драйвером является IR2110. И в этой статье/учебнике я буду говорить о именно о нём.
Вы можете загрузить документацию для IR2110 с сайта IR. Вот ссылка для загрузки: http://www.irf.com/product-info/datasheets/data/ir2110.pdf
Давайте для начала взглянем на блок-схему, а также описание и расположение контактов:
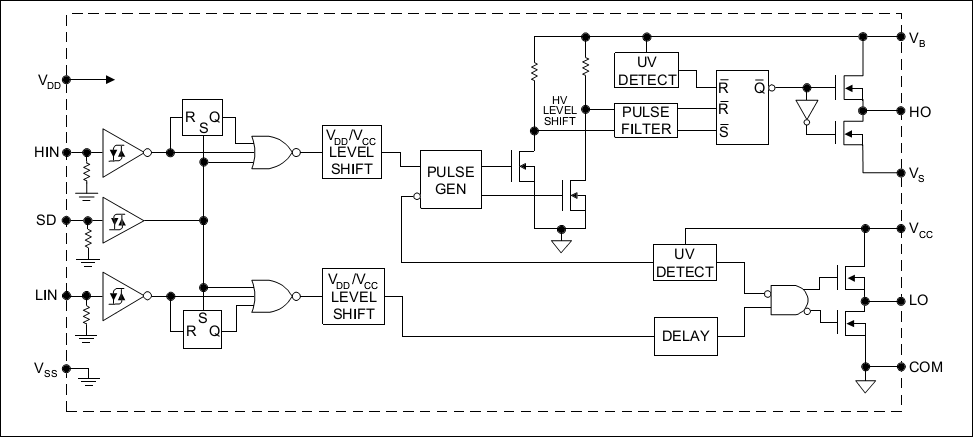
Рисунок 1 — Функциональная блок-схема IR2110
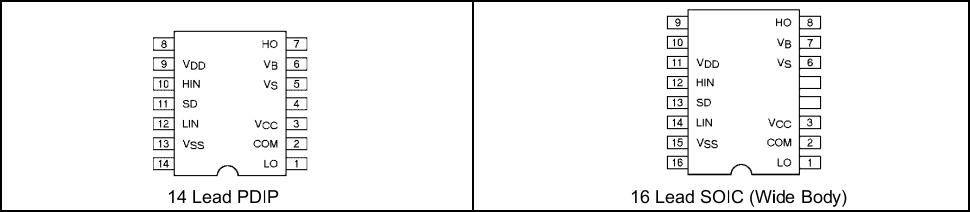
Рисунок 2 — Распиновка IR2110
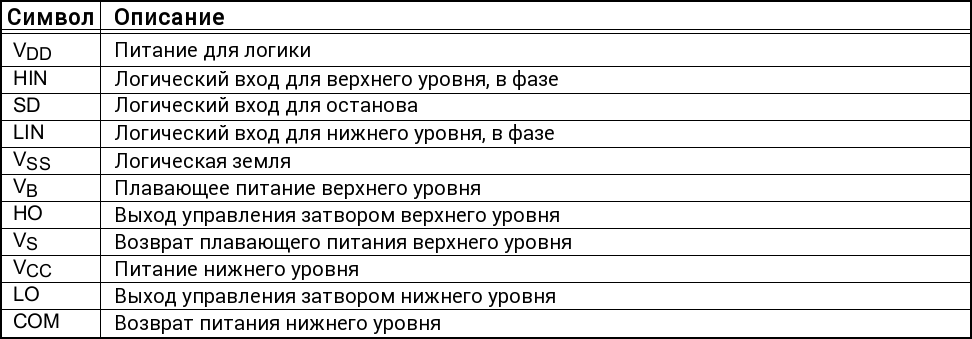
Рисунок 3 — Описание пинов IR2110
Также стоит упомянуть, что IR2110 выпускается в двух корпусах — в виде 14-контактного PDIP для выводного монтажа и 16-контактного SOIC для поверхностного монтажа.
Теперь поговорим о различных контактах.
VCC — это питание нижнего уровня, должно быть между 10В и 20В. VDD — это логическое питание для IR2110, оно должно быть между +3В и +20В (по отношению к VSS). Фактическое напряжение, которое вы выберете для использования, зависит от уровня напряжения входных сигналов. Вот график:
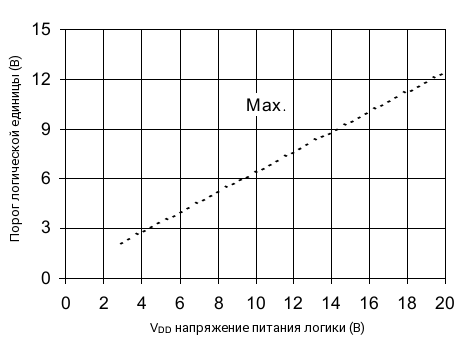
Рисунок 4 — Зависимость логической 1 от питания
Обычно используется VDD равное +5В. При VDD = +5В, входной порог логической 1 немного выше, чем 3В. Таким образом, когда напряжение VDD = +5В, IR2110 может быть использован для управления нагрузкой, когда вход «1» выше, чем 3 (сколько-то) вольт. Это означает, что IR2110 может быть использован почти для всех схем, так как большинство схем, как правило, имеют питание примерно 5В. Когда вы используете микроконтроллеры, выходное напряжение будет выше, чем 4В (ведь микроконтроллер довольно часто имеет VDD = +5В). Когда используется SG3525 или TL494 или другой ШИМ-контроллер, то, вероятно, придётся их запитывать напряжением большим, чем 10В, значит на выходах будет больше, чем 8В, при логической единице. Таким образом, IR2110 может быть использован практически везде.
Вы также можете снизить VDD примерно до +4В, если используете микроконтроллер или любой чип, который даёт на выходе 3.3В (например, dsPIC33). При проектировании схем с IR2110, я заметил, что иногда схема не работает должным образом, когда VDD у IR2110 был выбран менее + 4В. Поэтому я не рекомендую использовать VDD ниже +4В. В большинстве моих схем уровни сигнала не имеют напряжение меньше, чем 4В как «1», и поэтому я использую VDD = +5V.
Если по каким-либо причинам в схеме уровень сигнала логической «1» имеет напряжение меньшее, чем 3В, то вам нужно использовать преобразователь уровней/транслятор уровней, он будет поднимать напряжение до приемлемых пределов. В таких ситуациях я рекомендую повышение до 4В или 5В и использование у IR2110 VDD = +5В.
Теперь давайте поговорим о VSS и COM. VSS это земля для логики. COM это «возврат низкого уровня» — в основном, заземление низкого уровня драйвера. Это может выглядеть так, что они являются независимыми, и можно подумать что, пожалуй, было бы возможно изолировать выходы драйвера и сигнальную логику драйвера. Тем не менее, это было бы неправильно. Несмотря на то что внутренне они не связаны, IR2110 является неизолированным драйвером, и это означает, что VSS и COM должны быть оба подключены к земле.
HIN и LIN это логические входы. Высокий сигнал на HIN означает, что мы хотим управлять верхним ключом, то есть на HO осуществляется вывод высокого уровня. Низкий сигнал на HIN означает, что мы хотим отключить MOSFET верхнего уровня, то есть на HO осуществляется вывод низкого уровня. Выход в HO, высокий или низкий, считается не по отношению к земле, а по отношению к VS. Мы скоро увидим, как усилительные схемы (диод + конденсатор), используя VCC, VB и VS, обеспечивают плавающее питания для управления MOSFETом. VS это плавающий возврат питания. При высоком уровне, уровень на HO равен уровню на VB, по отношению к VS. При низком уровне, уровень на HO равнен VS, по отношению к VS, фактически нулю.
Высокий сигнал LIN означает, что мы хотим управлять нижним ключом, то есть на LO осуществляется вывод высокого уровня. Низкий сигнал LIN означает, что мы хотим отключить MOSFET нижнего уровня, то есть на LO осуществляется вывод низкого уровня. Выход в LO считается относительно земли. Когда сигнал высокий, уровень в LO такой же как и в VCC, относительно VSS, фактически земля. Когда сигнал низкий, уровень в LO такой же как и в VSS, относительно VSS, фактически нуль.
SD используется в качестве контроля останова. Когда уровень низкий, IR2110 включен — функция останова отключена. Когда этот вывод является высоким, выходы выключены, отключая управление IR2110.
Теперь давайте взглянем на частые конфигурации с IR2110 для управления MOSFETами как верхних и нижних ключей — на полумостовые схемы.
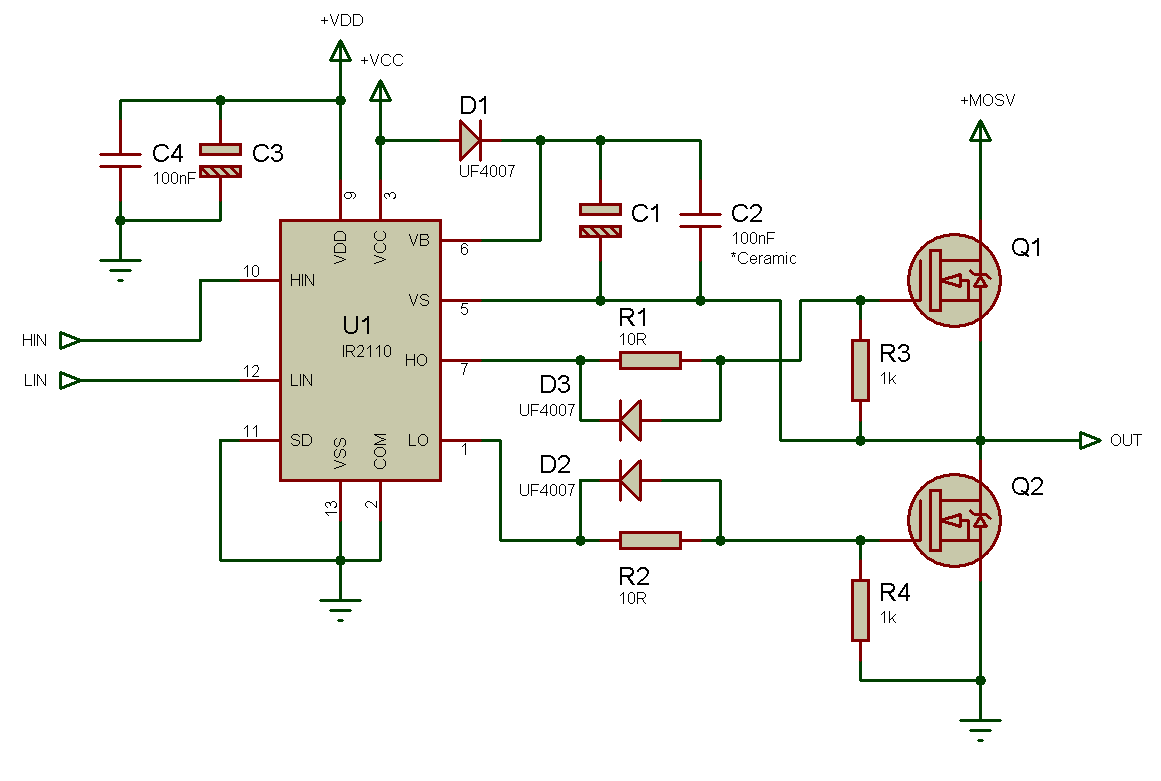
Рисунок 5 — Базовая схема на IR2110 для управления полумостом
D1, C1 и C2 совместно с IR2110 формируют усилительную цепь. Когда LIN = 1 и Q2 включен, то C1 и С2 заряжаются до уровня VB, так как один диод расположен ниже +VCC. Когда LIN = 0 и HIN = 1, заряд на C1 и С2 используется для добавления дополнительного напряжения, VB в данном случае, выше уровня источника Q1 для управления Q1 в конфигурации верхнего ключа. Достаточно большая ёмкость должна быть выбрана у C1 для того чтобы её хватило для обеспечения необходимого заряда для Q1, чтобы Q1 был включён всё это время. C1 также не должен иметь слишком большую ёмкость, так как процесс заряда будет проходить долго и уровень напряжения не будет увеличиваться в достаточной степени чтобы сохранить MOSFET включённым. Чем большее время требуется во включённом состоянии, тем большая требуется ёмкость. Таким образом меньшая частота требует большую ёмкость C1. Больший коэффициент заполнения требует большую ёмкость C1. Конечно есть формулы для расчёта ёмкости, но для этого нужно знать множество параметров, а некоторые из них мы может не знать, например ток утечки конденсатора. Поэтому я просто оценил примерную ёмкость. Для низких частот, таких как 50Гц, я использую ёмкость от 47мкФ до 68мкФ. Для высоких частот, таких как 30-50кГц, я использую ёмкость от 4.7мкФ до 22мкФ. Так как мы используем электролитический конденсатор, то керамический конденсатор должен быть использован параллельно с этим конденсатором. Керамический конденсатор не обязателен, если усилительный конденсатор — танталовый.
D2 и D3 разряжают затвор MOSFETов быстро, минуя затворные резисторы и уменьшая время отключения. R1 и R2 это токоограничивающие затворные резисторы.
+MOSV может быть максимум 500В.
+VCC должен идти с источника без помех. Вы должны установить фильтрующие и развязочные конденсаторы от +VCC к земле для фильтрации.
Давайте теперь рассмотрим несколько примеров схем с IR2110.
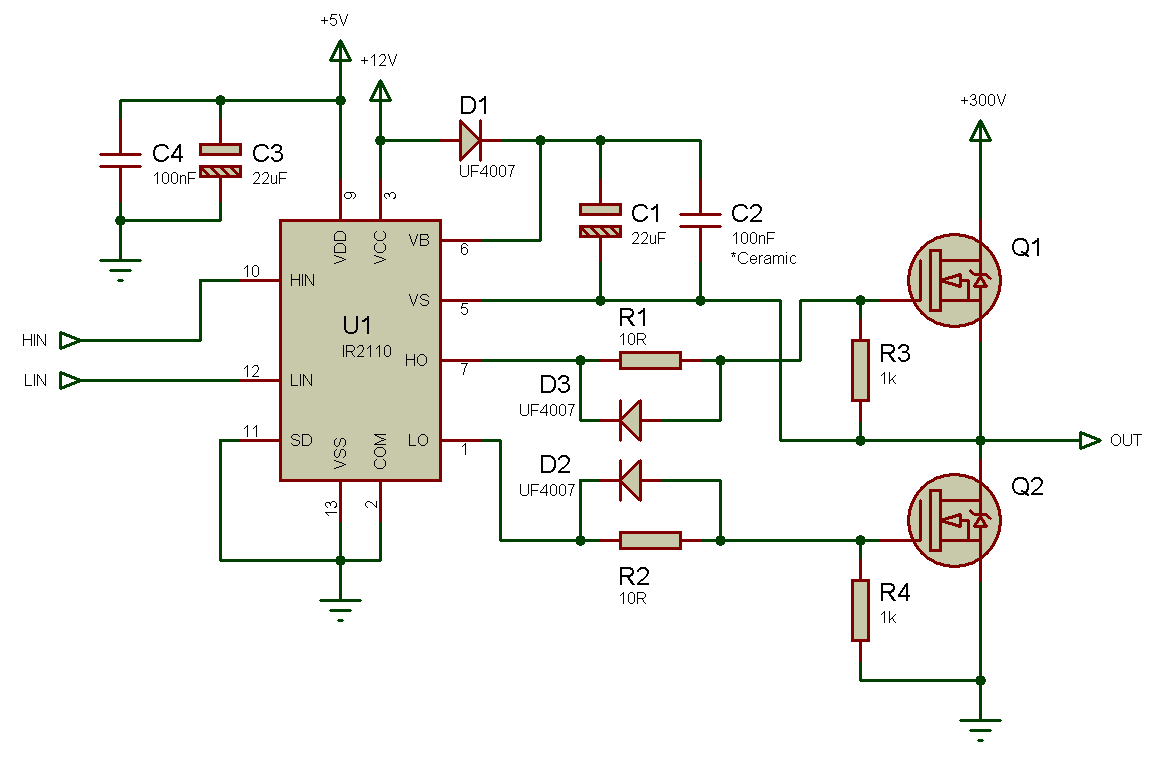
Рисунок 6 — Схема с IR2110 для высоковольтного полумоста
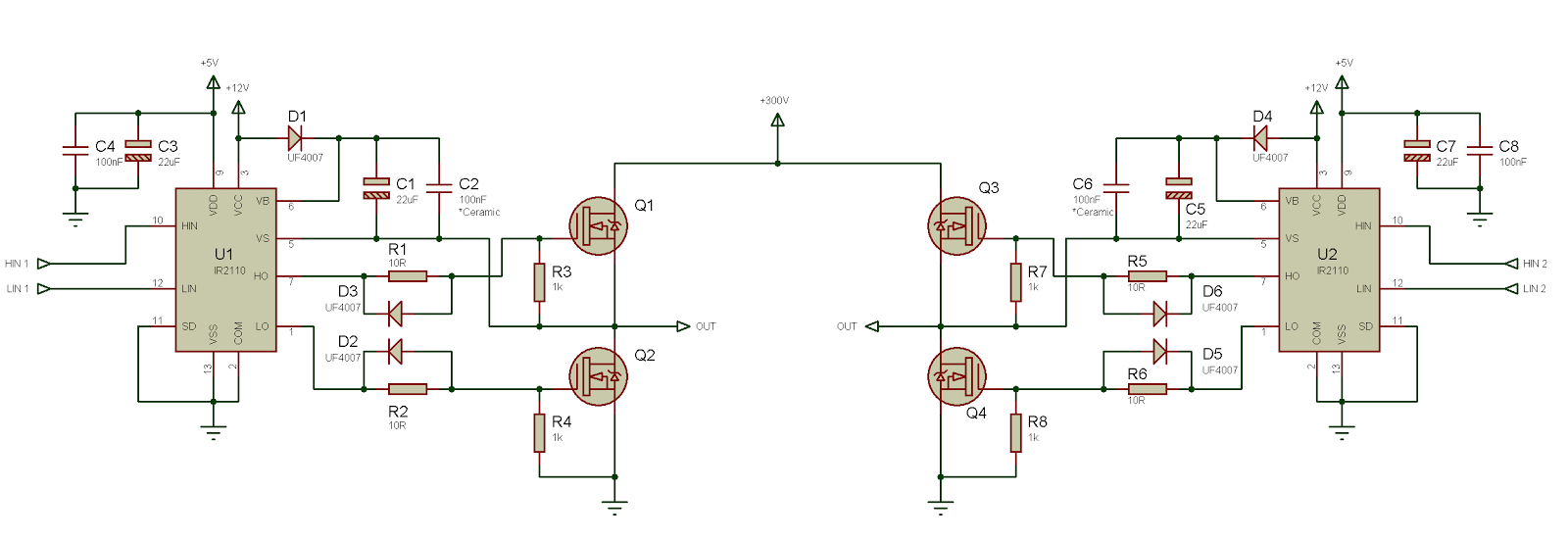
Рисунок 7 — Схема с IR2110 для высоковольтного полного моста с независимым управлением ключами (кликабельно)
На рисунке 7 мы видим IR2110, использованный для управления полным мостом. В ней нет ничего сложного и, я думаю, уже сейчас вы это понимаете. Также тут можно применить достаточно популярное упрощение: HIN1 мы соединяем с LIN2, а HIN2 мы соединяем с LIN1, тем самым мы получаем управление всеми 4 ключами используя всего 2 входных сигнала, вместо 4, это показано на рисунке 8.
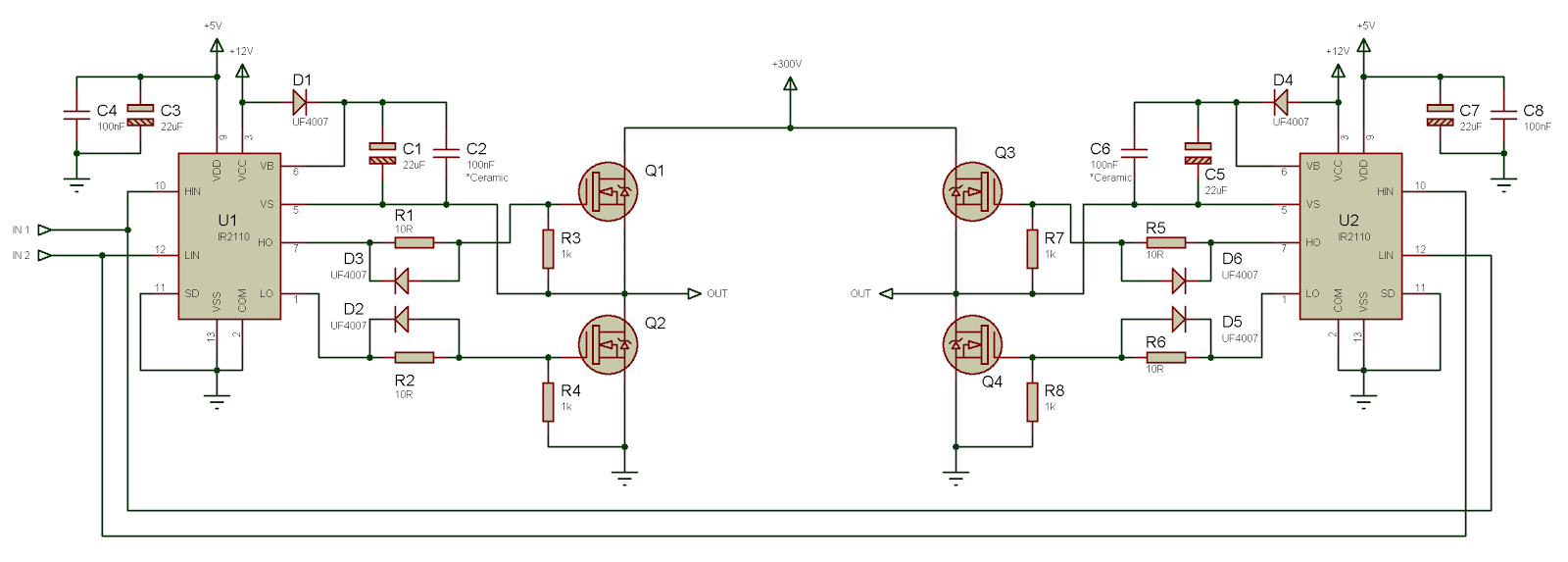
Рисунок 8 — Схема с IR2110 для высоковольтного полного моста с управлением ключами двумя входами (кликабельно)
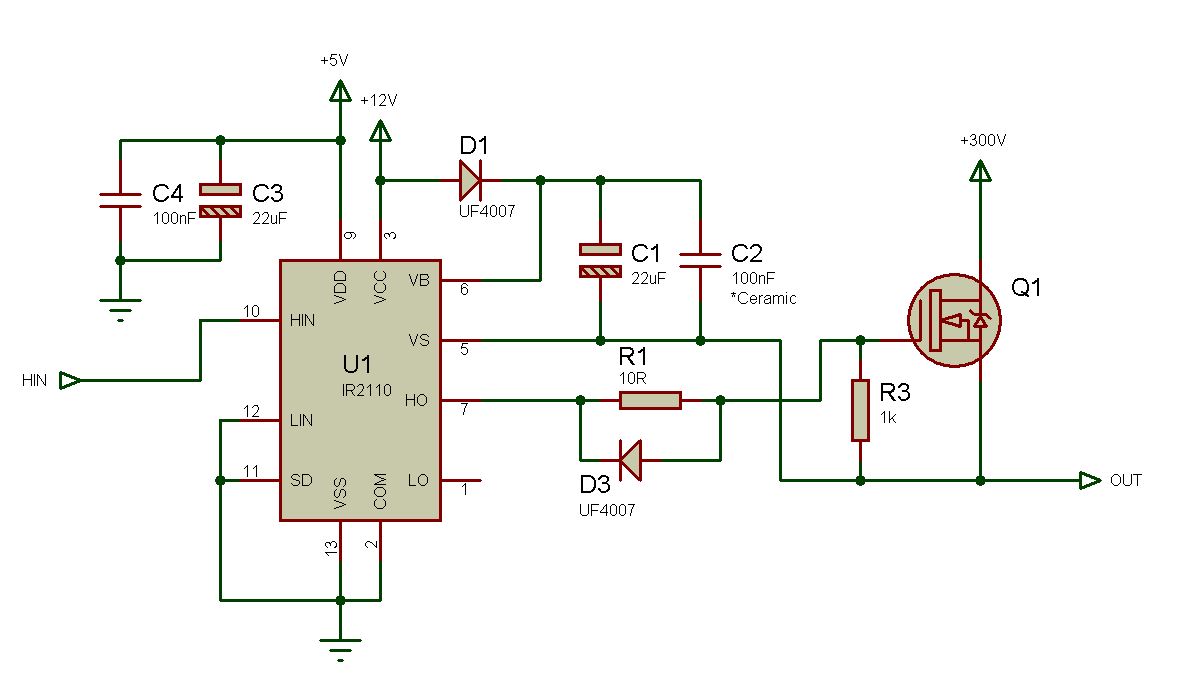
Рисунок 9 — Схема с IR2110 как высоковольтного драйвера верхнего уровня
На рисунке 9 мы видим IR2110 использованный как драйвер верхнего уровня. Схема достаточно проста и имеет такую же функциональность как было описано выше. Есть вещь которую нужно учесть — так как мы больше не имеем ключа нижнего уровня, то должна быть нагрузка подключённая с OUT на землю. Иначе усилительный конденсатор не сможет зарядится.
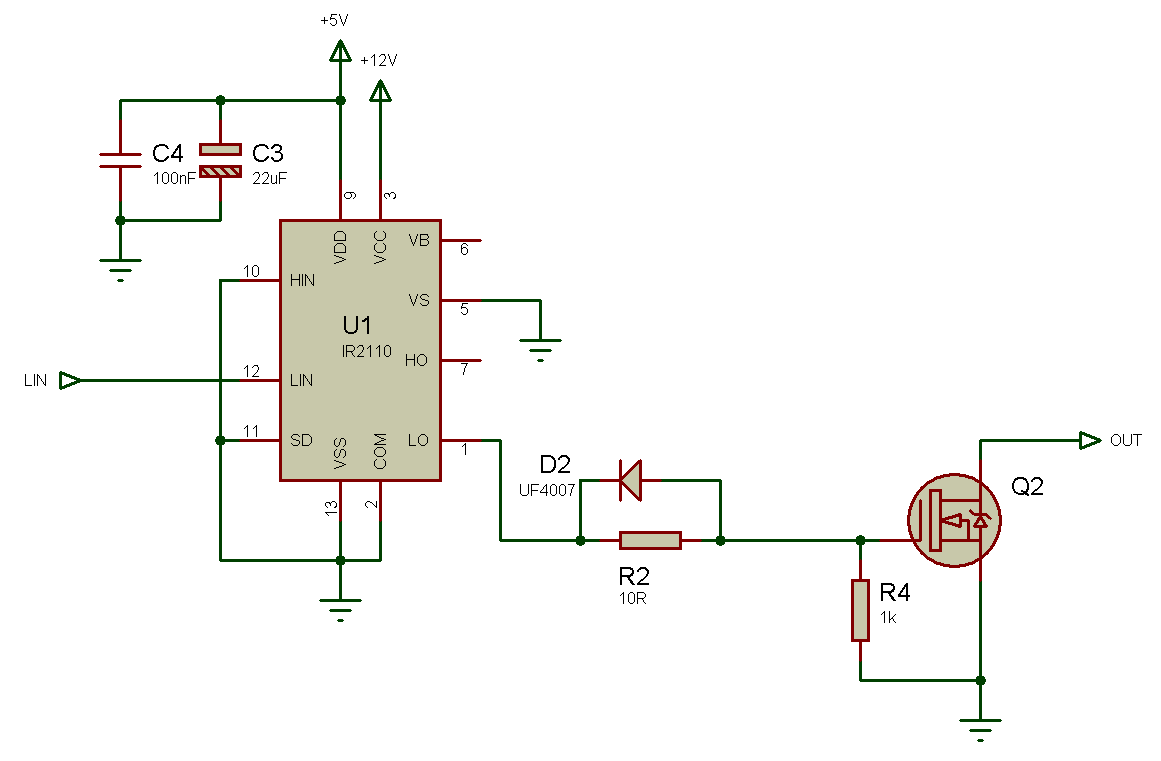
Рисунок 10 — Схема с IR2110 как драйвера нижнего уровня
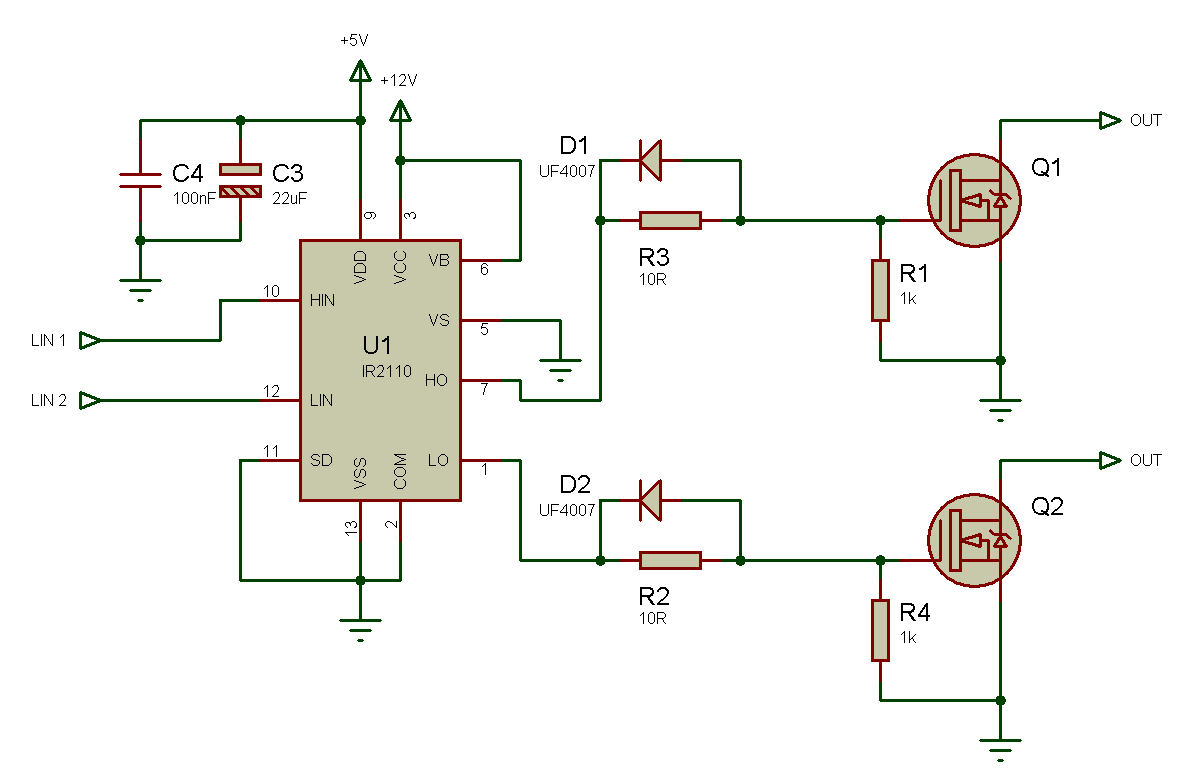
Рисунок 11 — Схема с IR2110 как двойного драйвера нижнего уровня
Если у вас проблемы с IR2110 и всё постоянно выходит из строя, горит или взрывается, то я уверен, что это из-за того, что вы не используете резисторы на затвор-исток, при условии, конечно, что вы всё спроектировали тщательно. НИКОГДА НЕ ЗАБЫВАЙТЕ О РЕЗИСТОРАХ НА ЗАТВОР-ИСТОК. Если вам интересно, вы можете прочитать о моем опыте с ними здесь (я также объясняю причину, по которой резисторы предотвращают повреждения): http://tahmidmc.blogspot.com/2012/10/magic-of-knowledge.html
Я видел как на многих форумах, люди бьются с проектированием схем на IR2110. У меня тоже было много трудностей прежде чем я cмог уверенно и последовательно строить успешные схемы драйвера на IR2110. Я попытался объяснить применение и использование IR2110 довольно тщательно, попутно всё объясняя и используя большое количество примеров, и я надеюсь, что это поможет вам в ваших начинаниях с IR2110.
Драйвер мощных полевых транзисторов MOSFET для низковольтных схем
Всем хороши мощные полевые транзисторы MOSFET, кроме одного маленького нюанса, — подключить их напрямую к выводам микроконтроллера зачастую оказывается невозможно.
Это, во-первых, связано с тем, что допустимые токи для микроконтроллерных выводов редко превышают 20 мА, а для очень быстрых переключений MOSFET-ов (с хорошими фронтами), когда нужно очень быстро заряжать или разряжать затвор (который всегда обладает некоторой ёмкостью), нужны токи на порядок больше.
И, во-вторых, питание контроллера обычно составляет 3 или 5 Вольт, что в принципе позволяет управлять напрямую только небольшим классом полевиков (которые называют logic level — с логическим уровнем управления). А учитывая, что обычно питание контроллера и питание остальной схемы имеет общий минусовой провод, этот класс сокращается исключительно до N-канальных «logic level»-полевиков.
Одним из выходов, в данной ситуации, является использование специальных микросхем, — драйверов, которые как раз и предназначены для того, чтобы тягать через затворы полевиков большие токи. Однако и такой вариант не лишён недостатков. Во-первых, драйверы далеко не всегда есть в наличии в магазинах, а во-вторых, они достаточно дороги.
В связи с этим возникла мысль сделать простой, бюджетный драйвер на рассыпухе, который можно было бы использовать для управления как N-канальными, так и P-канальными полевиками в любых низковольтных схемах, скажем вольт до 20. Ну, благо у меня, как у настоящего радиохламера, навалом всякой электронной рухляди, поэтому после серии экспериментов родилась вот такая схема:
- R1=2,2 кОм, R2=100 Ом, R3=1,5 кОм, R4=47 Ом
- D1 — диод 1N4148 (стеклянный бочонок)
- T1, T2, T3 — транзисторы KST2222A (SOT-23, маркировка 1P)
- T4 — транзистор BC807 (SOT-23, маркировка 5C)
Ёмкость между Vcc и Out символизирует подключение P-канального полевика, ёмкость между Out и Gnd символизирует подключение N-канального полевика (ёмкости затворов этих полевиков).
Пунктиром схема разделена на два каскада (I и II). При этом первый каскад работает как усилитель мощности, а второй каскад — как усилитель тока. Подробно работа схемы описана ниже.
Итак. Если на входе In появляется высокий уровень сигнала, то транзистор T1 открывается, транзистор T2 закрывается (поскольку потенциал на его базе падает ниже потенциала на эмиттере). В итоге транзистор T3 закрывается, а транзистор T4 открывается и через него происходит перезаряд ёмкости затвора подключенного полевика. (Ток базы транзистора T4 течёт по пути ЭT4->БT4->D1->T1->R2->Gnd).
Если на входе In появляется низкий уровень сигнала, то всё происходит наоборот, — транзистор T1 закрывается, в результате чего вырастает потенциал базы транзистора T2 и он открывается. Это, в свою очередь, приводит к открытию транзистора T3 и закрытию транзистора T4. Перезаряд ёмкости затвора подключенного полевика происходит через открытый транзистор T3. (Ток базы транзистора T3 течёт по пути Vcc->T2->R4->БT3->ЭT3).
Вот в общем-то и всё описание, но некоторые моменты, наверное, требуют дополнительного пояснения.
Во-первых, для чего нужны транзистор T2 и диод D1 в первом каскаде? Тут всё очень просто. Я не зря выше написал пути протекания токов базы выходных транзисторов для разных состояний схемы. Посмотрите на них ещё раз и представьте что было бы, если бы не было транзистора T2 с обвязкой. Транзистор T4 отпирался бы в этом случае большим током (имеется ввиду ток базы транзистора), протекающим с выхода Out через открытый T1 и R2, а транзистор T3 отпирался бы маленьким током, протекающим через резистор R3. Это привело бы к сильно затянутому переднему фронту выходных импульсов.
Ну и во-вторых, наверняка многих заинтересует, зачем нужны резисторы R2 и R4. Их я воткнул для того, чтобы хоть немного ограничить пиковый ток через базы выходных транзисторов, а также окончательно подравнять передний и задний фронты импульсов.
Собранное устройство выглядит вот так:
Разводка драйвера сделана под smd-компоненты, причём таким образом, чтобы его можно было легко подключать к основной плате устройства (в вертикальном положении). То есть на основной плате у нас может быть разведён полумост, H-мост или что-то ещё, а уже в эту плату останется только вертикально воткнуть в нужных местах платы драйверов.
Разводка имеет некоторые особенности. Для радикального уменьшения размеров платы пришлось «слегка неправильно» сделать разводку транзистора T4. Его перед припаиванием на плату нужно перевернуть лицом (маркировкой) вниз и выгнуть ножки в обратную сторону (к плате).
Ниже приведены осциллограммы работы драйвера для напряжений питания 8В и 16В на частоте 200 кГц (форма входного сигнала — меандр). В качестве нагрузки — конденсатор 4,7 нФ:
Как видите, длительности фронтов практически не зависят от уровня питающего напряжения и составляют чуть больше 100 нс. По-моему, довольно неплохо для такой бюджетной конструкции.
Понравилась статья? Поделись с друзьями!