Страница не найдена
Этот вопрос был удалён с сайта Stack Overflow на русском в процессе модерации . Чтобы узнать возможные причины удаления вопроса, обратитесь в справочный центр.
Несколько вопросов, которые могут быть вам полезны:
- Поворот точки android
- Поворот при соприкосновении
- Поворот ui за камерой?
- Поворот объекта
- unity поворот объекта
- Поворот вектора относительно второго
- Поворот Объекта unity
Если вы думаете, что здесь чего-то не хватает, свяжитесь с нами.
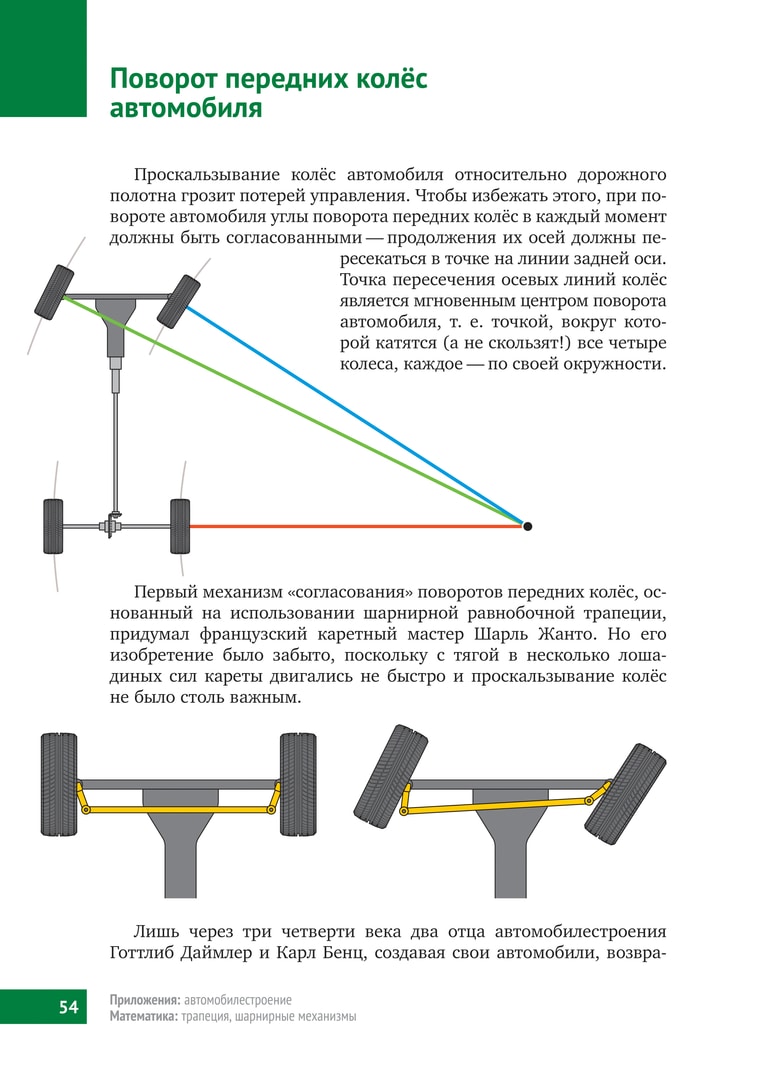
Поворот передних колёс автомобиля
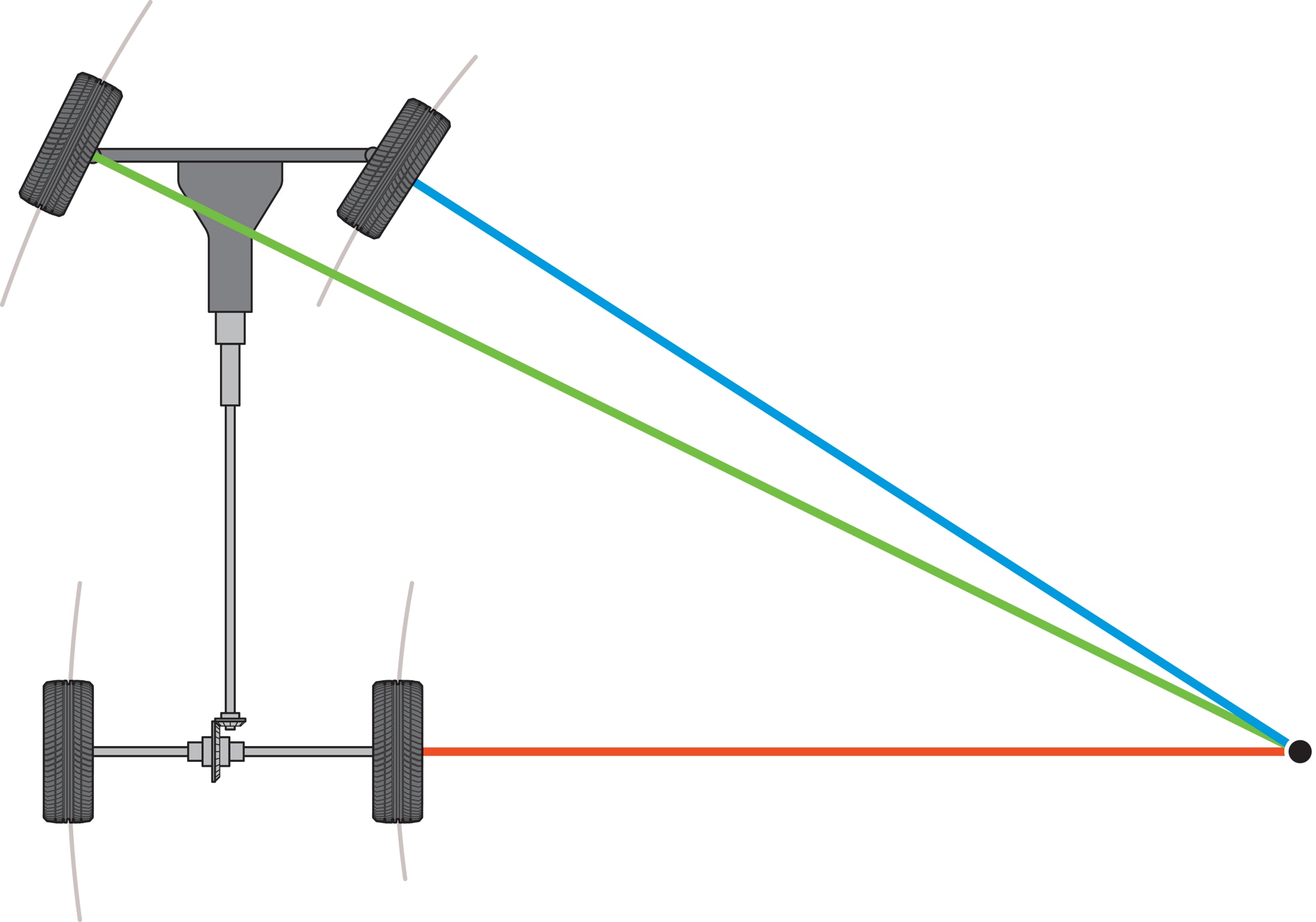
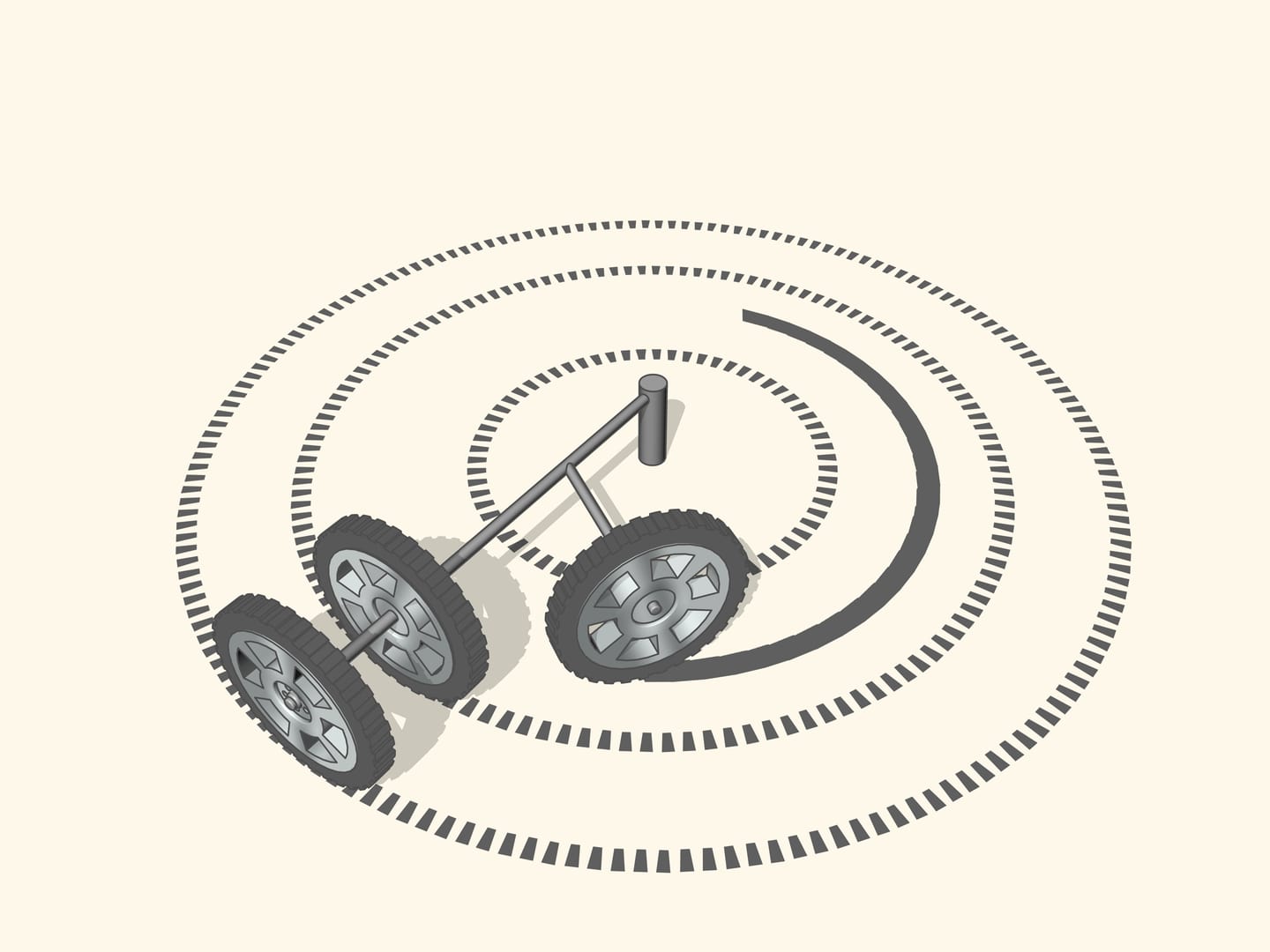
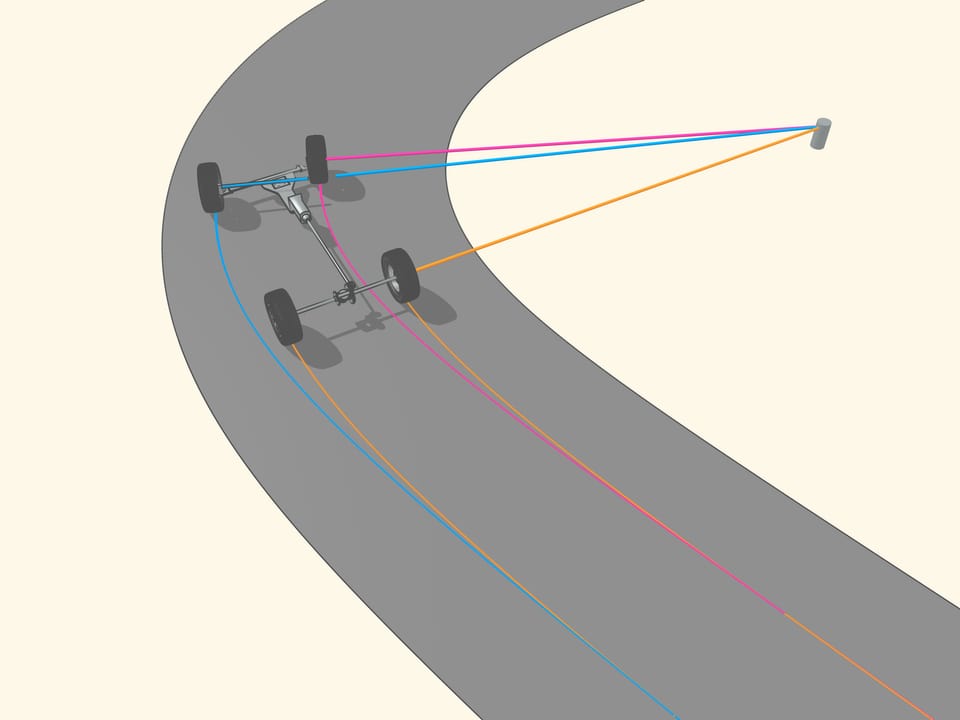
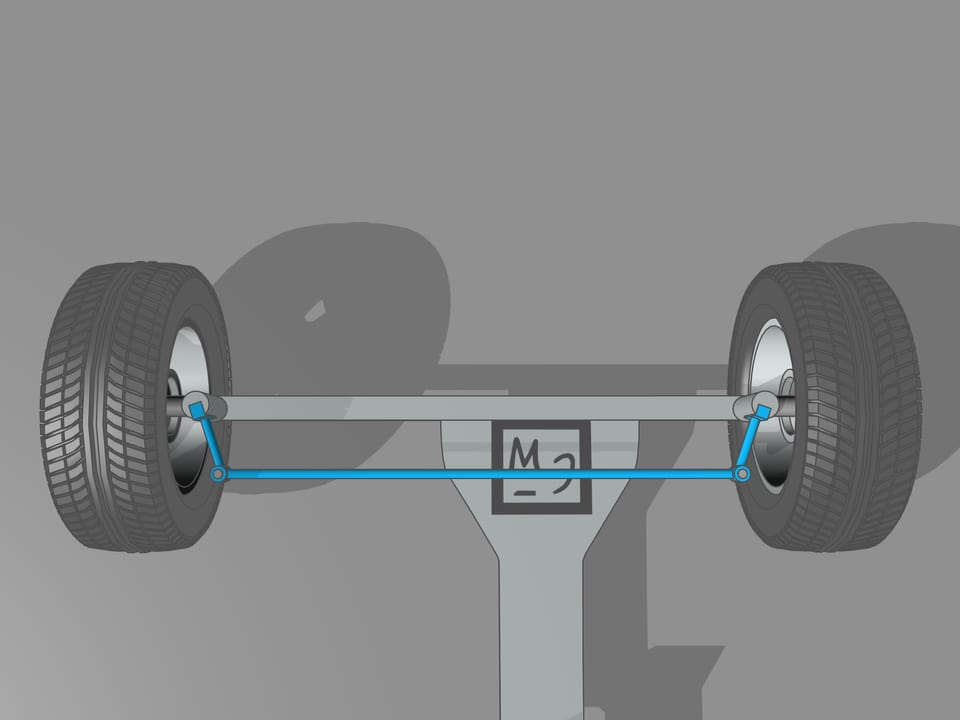
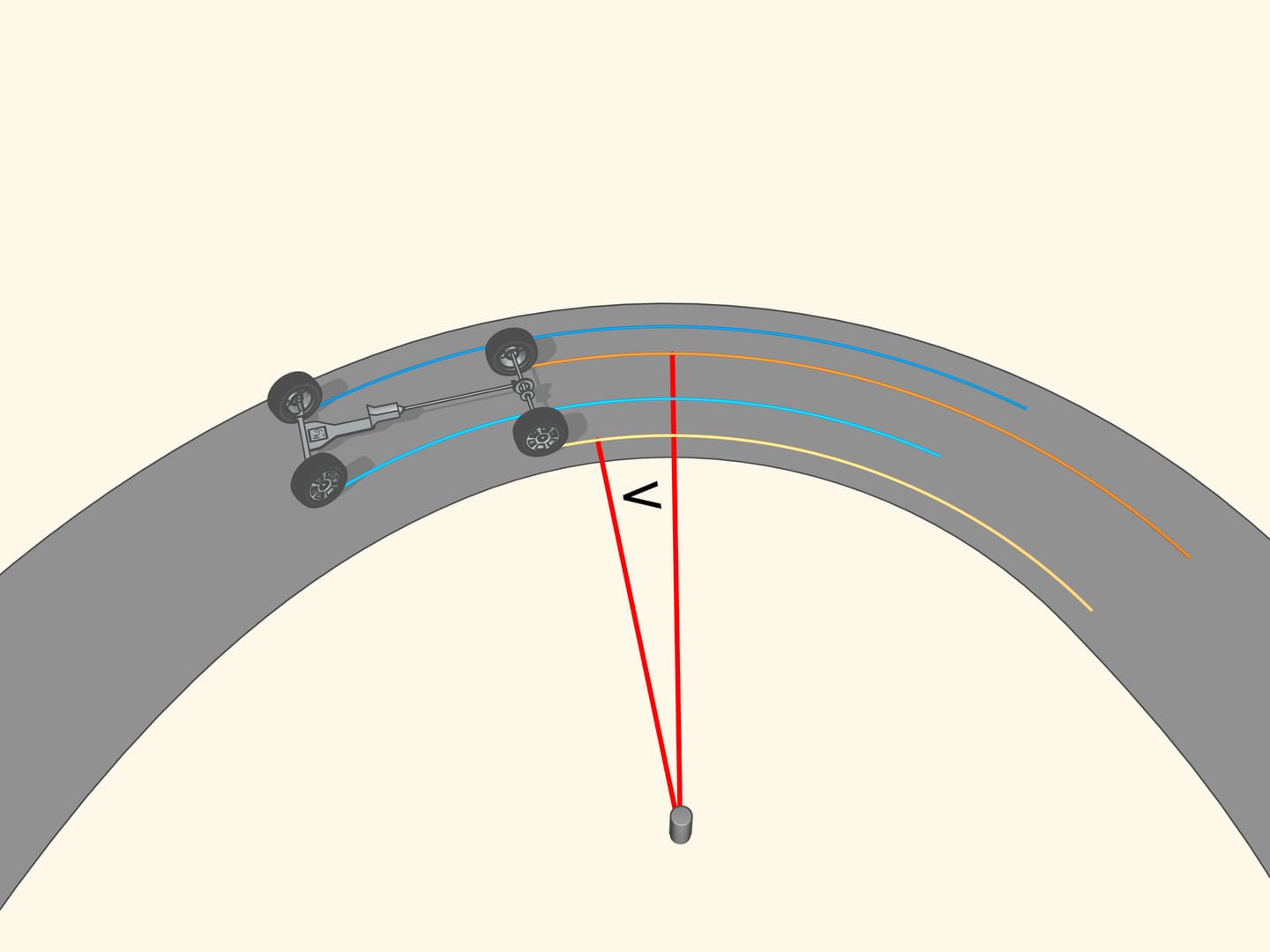
Проскальзывание колёс автомобиля относительно дорожного полотна грозит потерей управления. Чтобы избежать этого, при повороте автомобиля углы поворота передних колёс в каждый момент должны быть согласованными — продолжения их осей должны пересекаться в точке на линии задней оси. Точка пересечения осевых линий колёс является мгновенным центром поворота автомобиля, т. е. точкой, вокруг которой катятся (а не скользят!) все четыре колеса, каждое — по своей окружности.
Первый механизм «согласования» поворотов передних колёс, основанный на использовании шарнирной равнобочной трапеции, придумал французский каретный мастер Шарль Жанто. Но его изобретение было забыто, поскольку с тягой в несколько лошадиных сил кареты двигались не быстро и проскальзывание колёс не было столь важным.
Лишь через три четверти века два отца автомобилестроения Готтлиб Даймлер и Карл Бенц, создавая свои автомобили, возвращаются к трапеции Жанто. В 1889 году Даймлер получает патент на «способ независимого управления передними колёсами с разновеликими радиусами поворота». А в 1893 году Бенц получает патент на «устройство управления экипажей с тангенциальными к колёсам окружностями управления». С тех пор трапеция «управляет» автомобилем. Конечно, за это время техника усложнилась. У большинства современных машин колёса ходят по высоте относительно друг друга, поэтому для управления ими плоский шарнирный механизм (трапеция) уже не подходит. Однако и в наши дни механизм, поворачивающий передние колёса автомобиля, называется рулевой трапецией. Современные конструкторы научились поворачивать и задние колёса автомобиля, эта возможность реализована в некоторых моделях. По сравнению с описанной классической схемой, у автомобиля с функцией согласованного поворота всех четырёх колёс существенно уменьшается минимальный радиус поворота. Рассматривая поведение колёс автомобиля при повороте, нельзя не отметить ещё одну проблему геометрического толка. При повороте колёса на одной оси катятся по дугам окружностей разных радиусов, поэтому должны отличаться и пройденные ими пути. В изображённой на первом рисунке ситуации у автомобиля ведущая ось — задняя, передние колёса независимы и будут свободно крутиться, каждое со своей скоростью. А вот задние колёса — колёса ведущей оси. Их обязанность — толкать автомобиль вперёд. И в то же время разность путей, пройденных ими при повороте, означает, что вращаться эти колёса должны с разными скоростями.
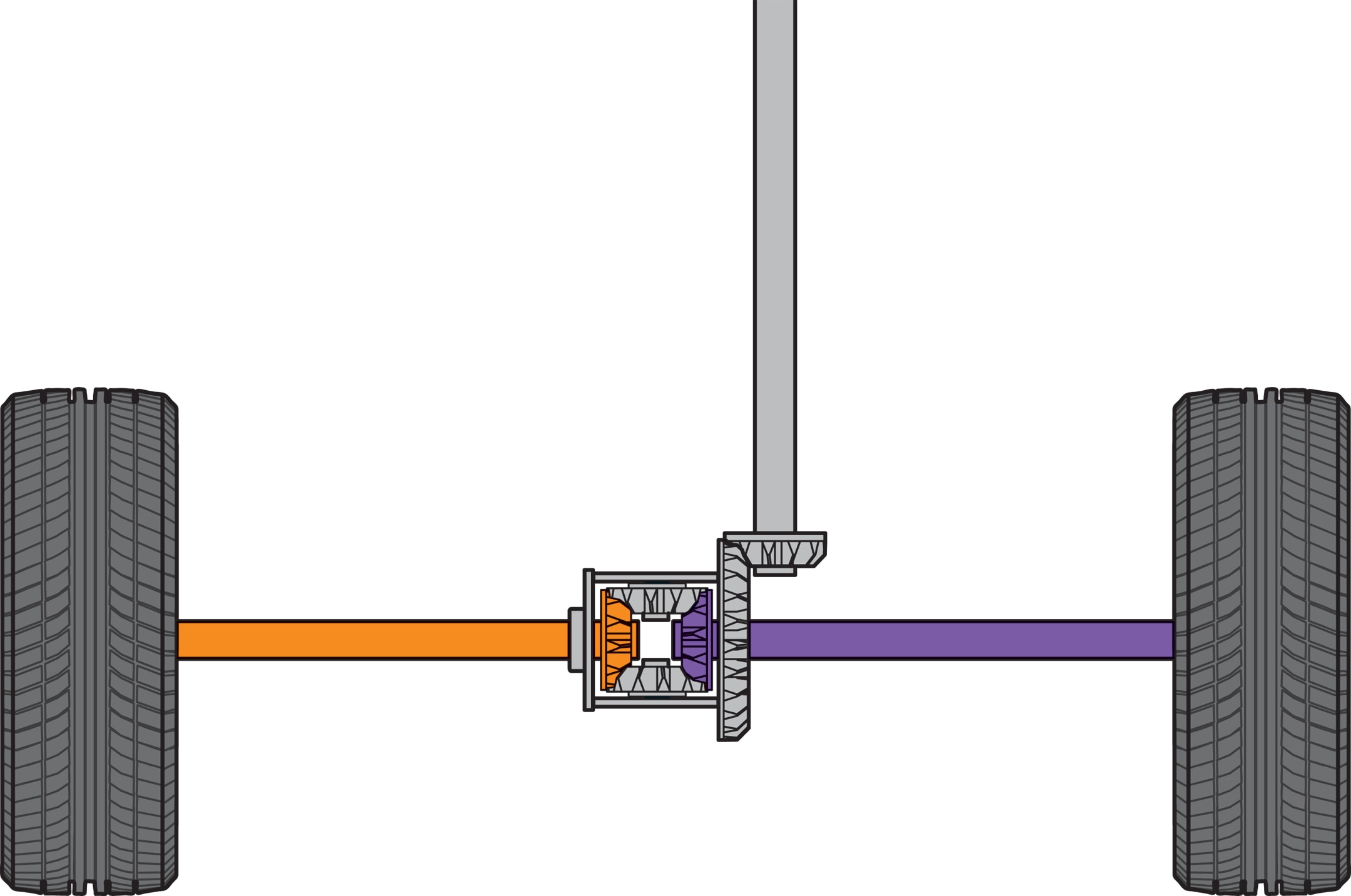
Сделать так, чтобы ведущие колёса могли подстраиваться под проходимый ими путь (как и их «свободные» коллеги — передние колёса), удаётся при помощи механизма, который называется дифференциал. Дифференциал, в полном соответствии со своим названием, раздаёт вращательное движение карданного вала на полуоси ведущей оси так, что они могут вращаться с разными скоростями!
Разворот книги
Дополнения, комментарии
Механизм рулевой трапеции на основе шарнирной равнобочной трапеции часто называют четырёхугольником Жанто в честь придумавшего его мастера. Но в этом простом механизме даже теоретически нельзя добиться идеального результата: чтобы при повороте передних колёс точка пересечения продолжения их осей всё время находилась на продолжении задней оси. С достаточной для практических нужд точностью это достигается: стороны трапеции Жанто подбираются так, чтобы точка пересечения передних осей находилась «рядом» с прямой задней оси. Теорию четырёхугольника Жанто изложил профессор Московского университета Болеслав Корнелиевич Млодзеевский в небольшой работе «К теории управления в автомобилях» (Вестник инженеров, 1917, № 2, стр. 37—41).
Геометрия поворота
Параллельны ли друг другу передние колёса автомобиля при повороте?
Оказывается, что именно геометрия и механика определяют то, как надо поворачивать колёса автомобиля.
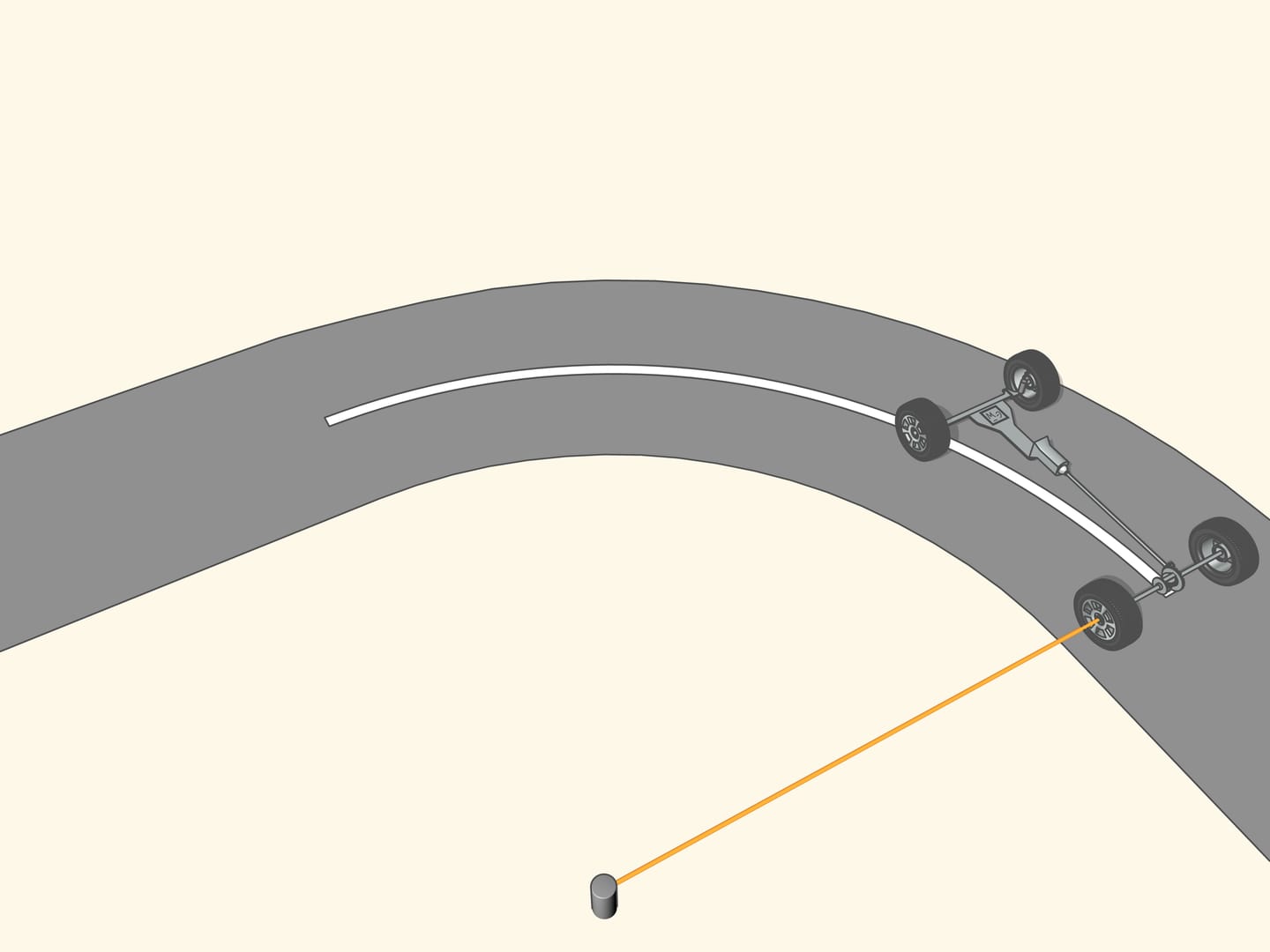
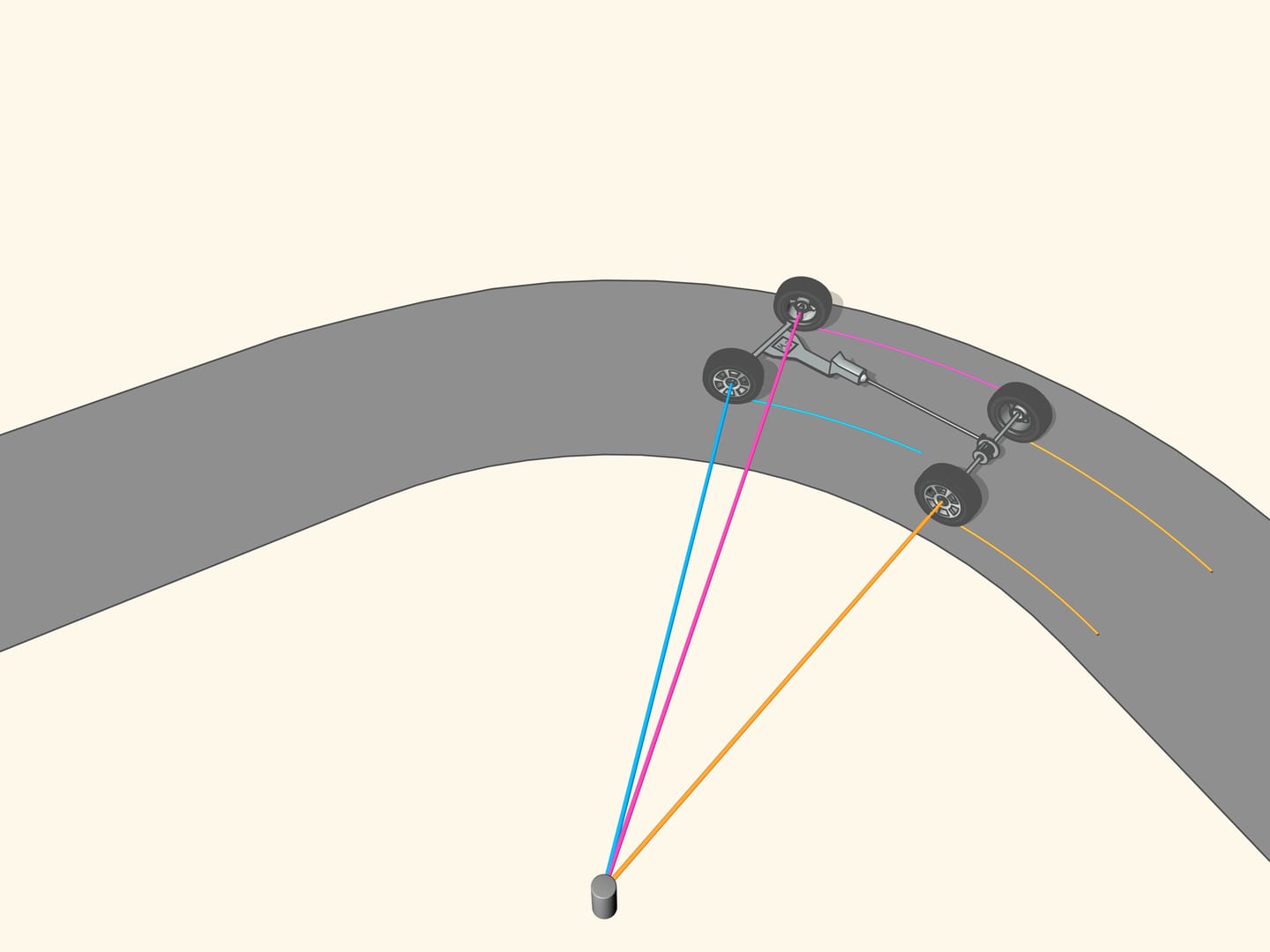
Если продолжение оси колёс направлено в центр поворота, то колесо оставляет чёткий след. Чёткая картинка будет, и если несколько осей направлены в центр поворота. Однако, если продолжение оси колеса направлено не в центр поворота, то колесо катится с проскальзыванием. След будет стёртым, а самое главное, управляемость транспорта с таким колесом будет тем хуже, чем выше скорость. Итак, для хорошей управляемости продолжения осей колес должны быть направлены в центр поворота. Что же это значит для четырёхколёсного автомобиля?
Научимся для начала проходить простой поворот — дугу окружности.
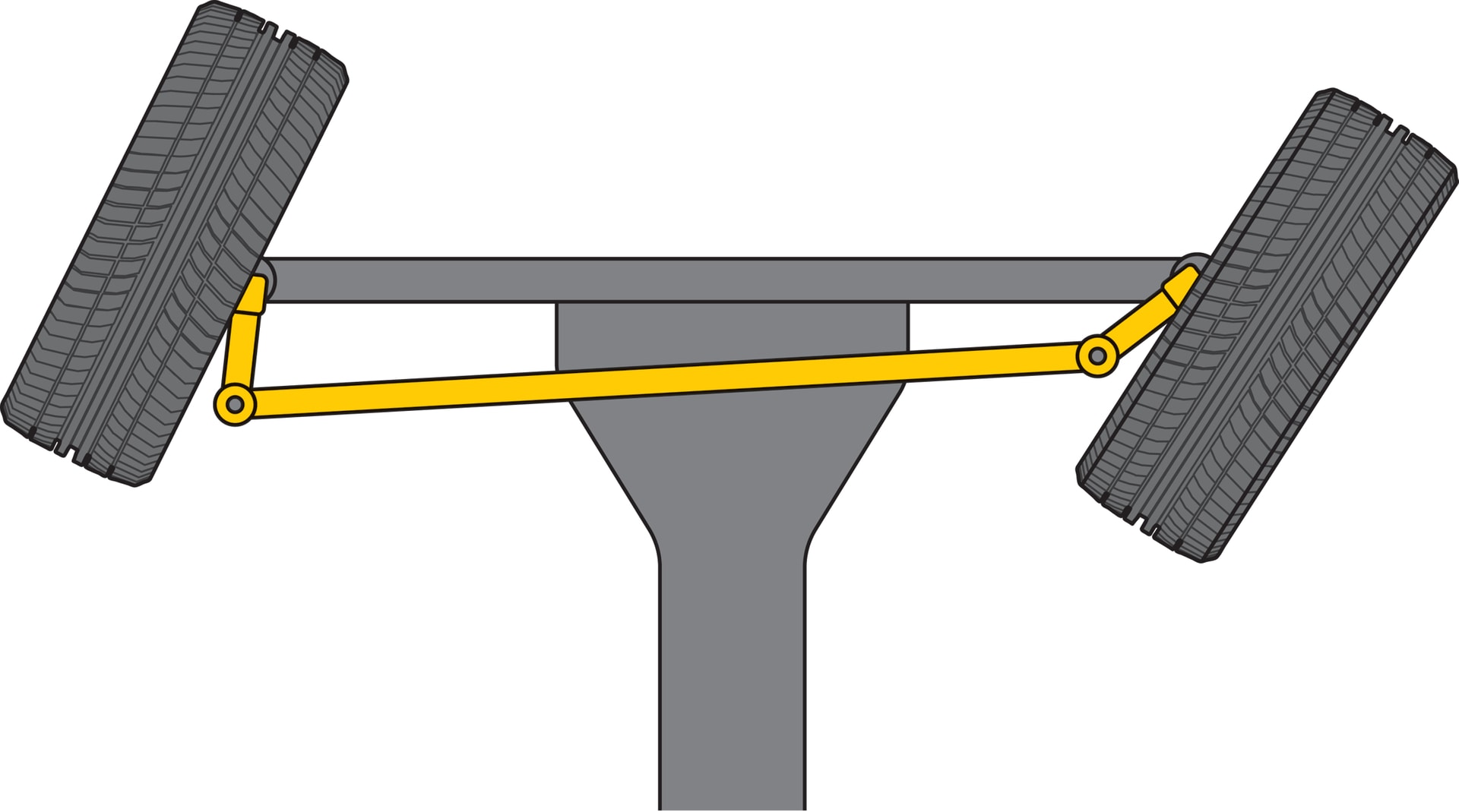
Так как задние колёса в большинстве машин не поворачиваются, то центр окружности поворота должен лежать на продолжении оси этих колёс. Передние колёса необходимо повернуть так, чтобы продолжение оси каждого колеса смотрело в этот же центр. А значит, для хорошей управляемости передние колёса необходимо поворачивать на разные углы, и они будут непараллельны!
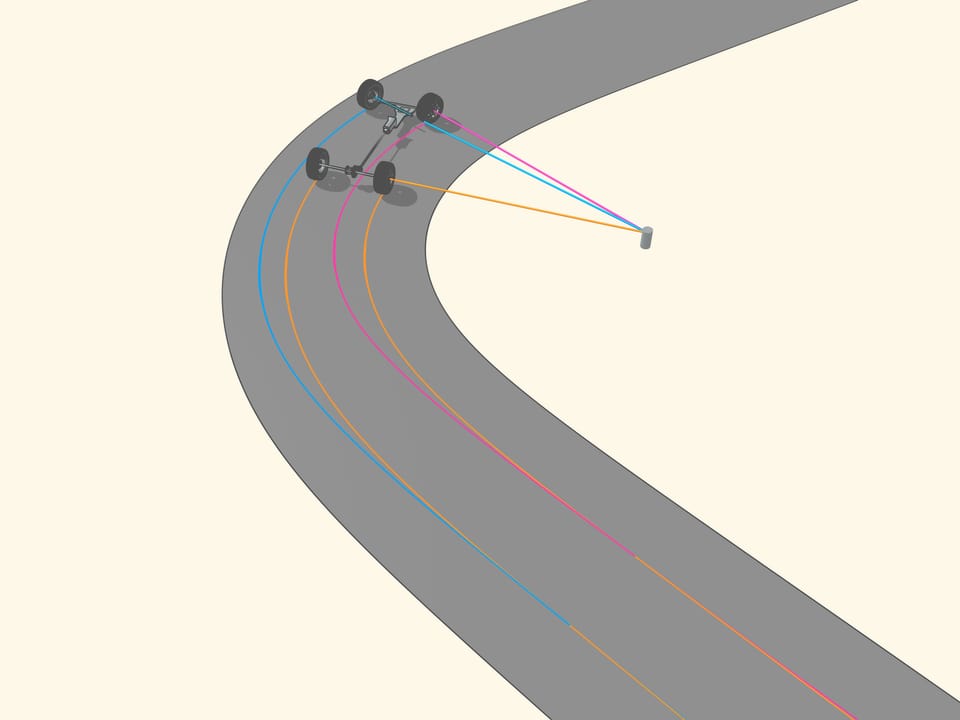
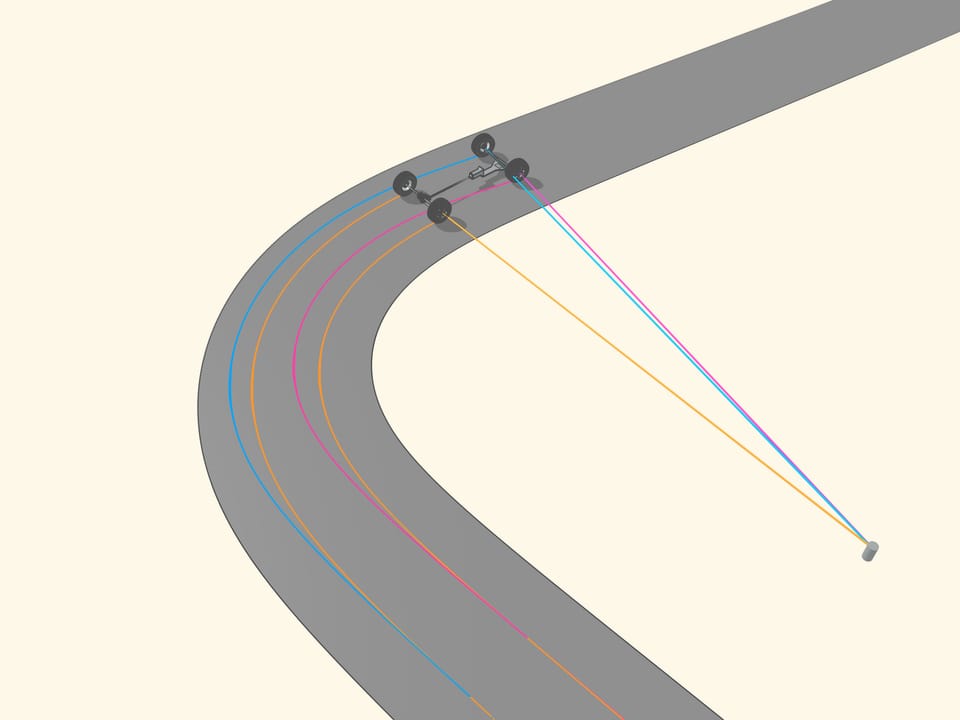
Вы скажете, что повороты не всегда являются дугой какой-либо окружности, и уж тем более машина не останавливается для того, чтобы повернуть колёса. Это, конечно, правда, но оказывается, что при любом повороте в каждый момент времени можно считать, что машина едет по дуге некоторой окружности (радиус и центр которой зависят от момента времени).
Рассмотрим произвольную дорогу. Чтобы по ней можно было ездить, у неё не должно быть острых углов, т. е. средняя линия будет, как говорят в математике, гладкой кривой.
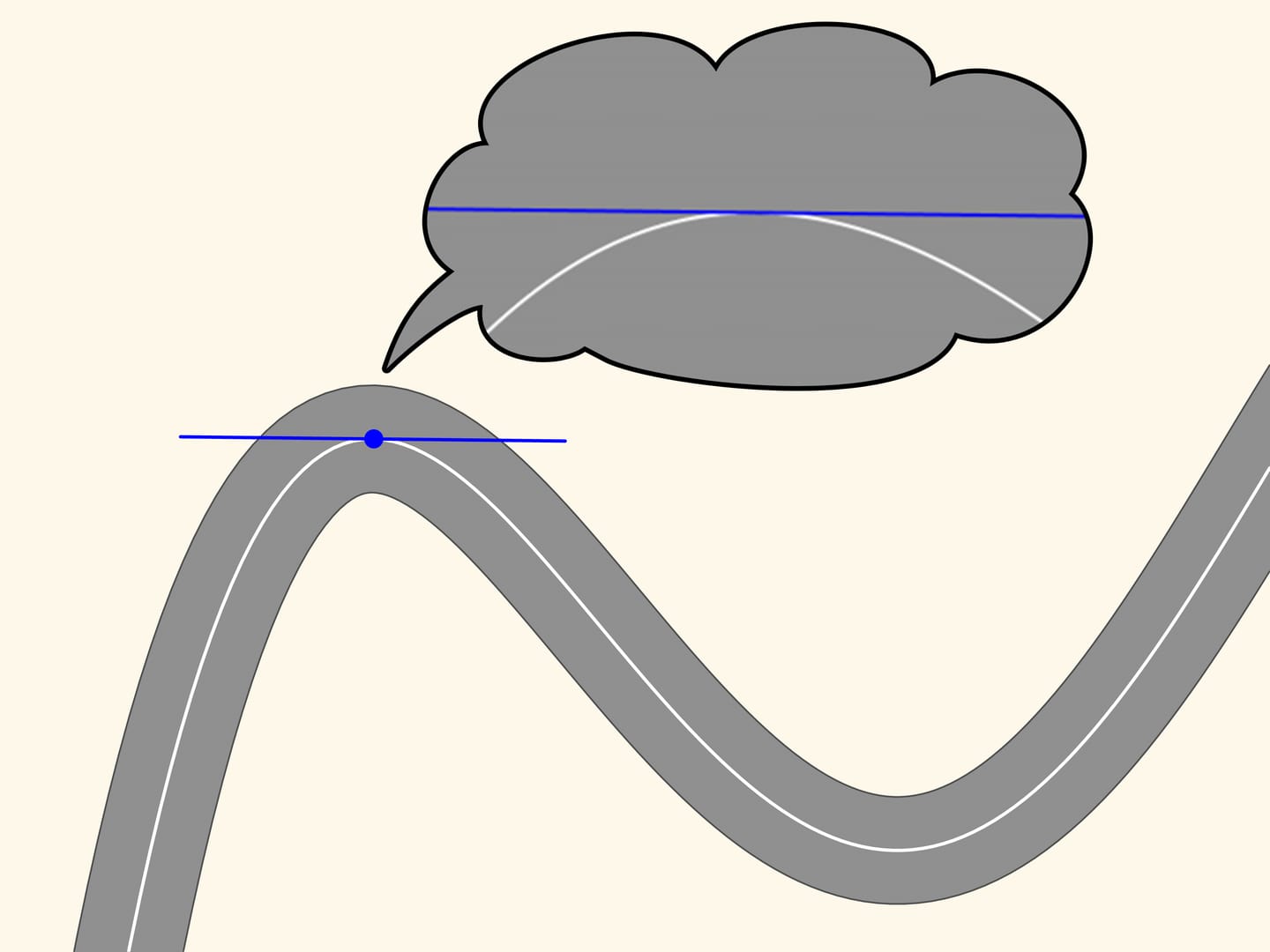
Зафиксируем синюю точку на средней линии и подумаем, каким более простым геометрическим объектом можно заменить кривую в небольшой окрестности нашей точки.
Возьмём произвольную красную точку недалеко от синей. Две точки на плоскости определяют единственную прямую, которую и проведём. Будем двигать красную точку по кривой к синей. В момент, когда они совпадут, прямая, ими определяемая, будет касательной прямой. Она даёт линейное приближение кривой дороги в небольшой окрестности зафиксированной точки. Однако при увеличении видно, что дорога и касательная прямая рядом идут на очень маленьком участке.
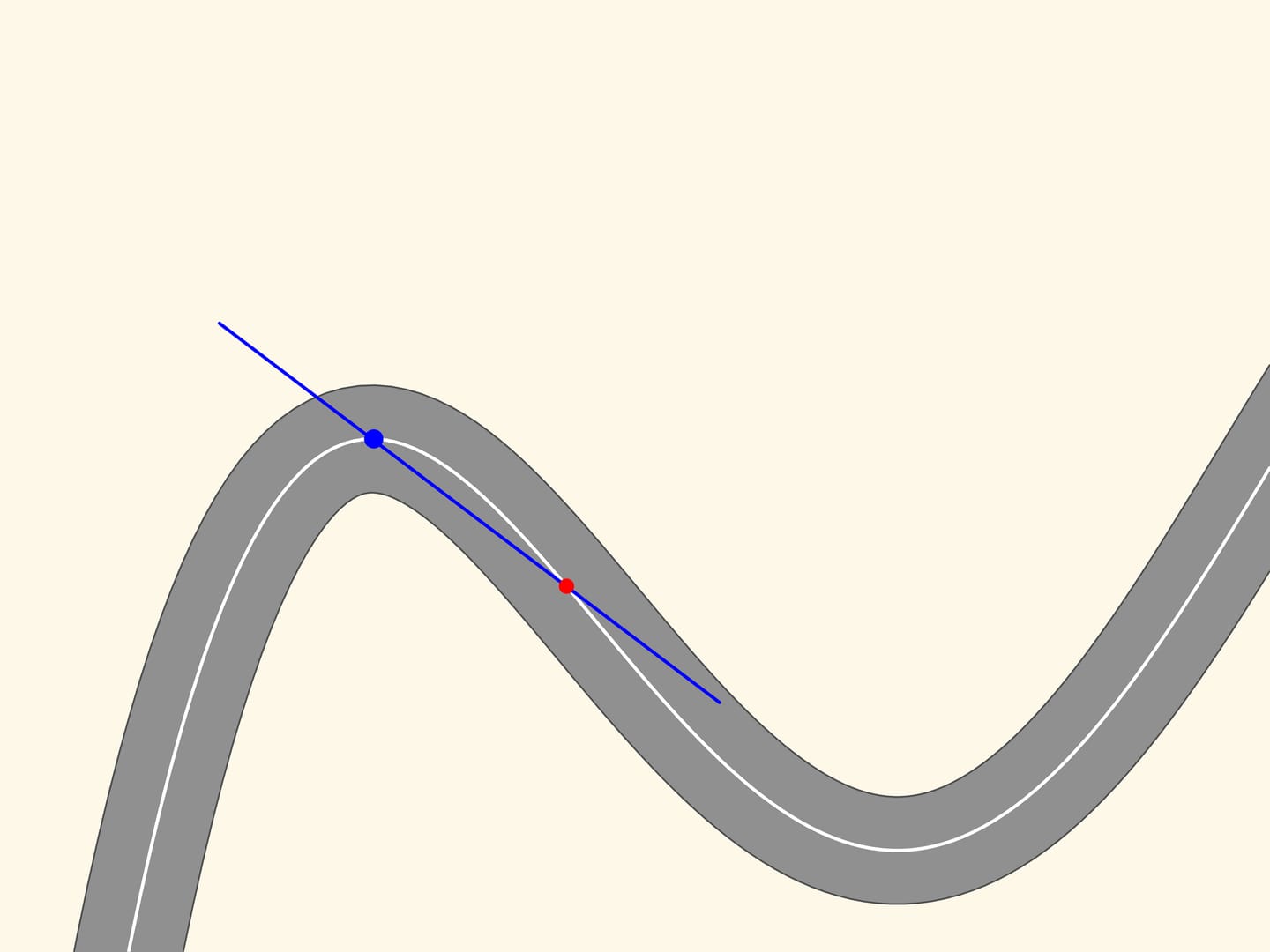
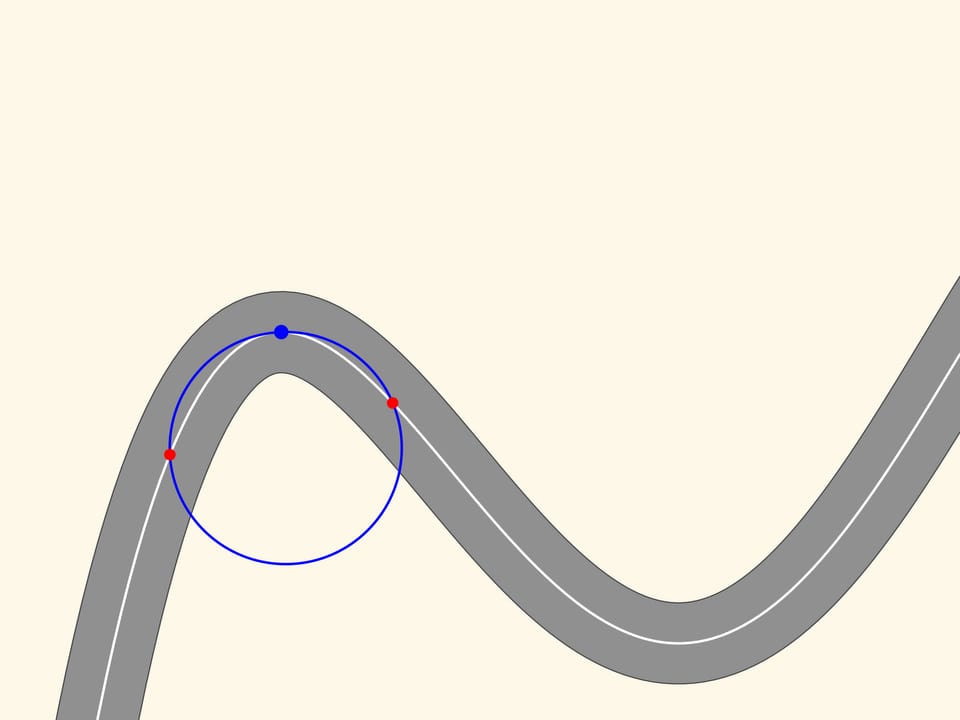
Справа и слева от синей точки возьмём по красной. Три точки, не лежащие на одной прямой, определяют единственную окружность, которую и проведём. Будем двигать красные точки к синей. В момент, когда они совпадут, получим окружность, которая называется соприкасающейся. Это приближение уже второго порядка, и на увеличении видно, насколько оно лучше. Заметим, что на монотонном участке (возрастания или убывания кривой) соприкасающаяся окружность всегда пересекает кривую, в отличие от касательной, расположенной на таких участках по одну сторону от кривой.
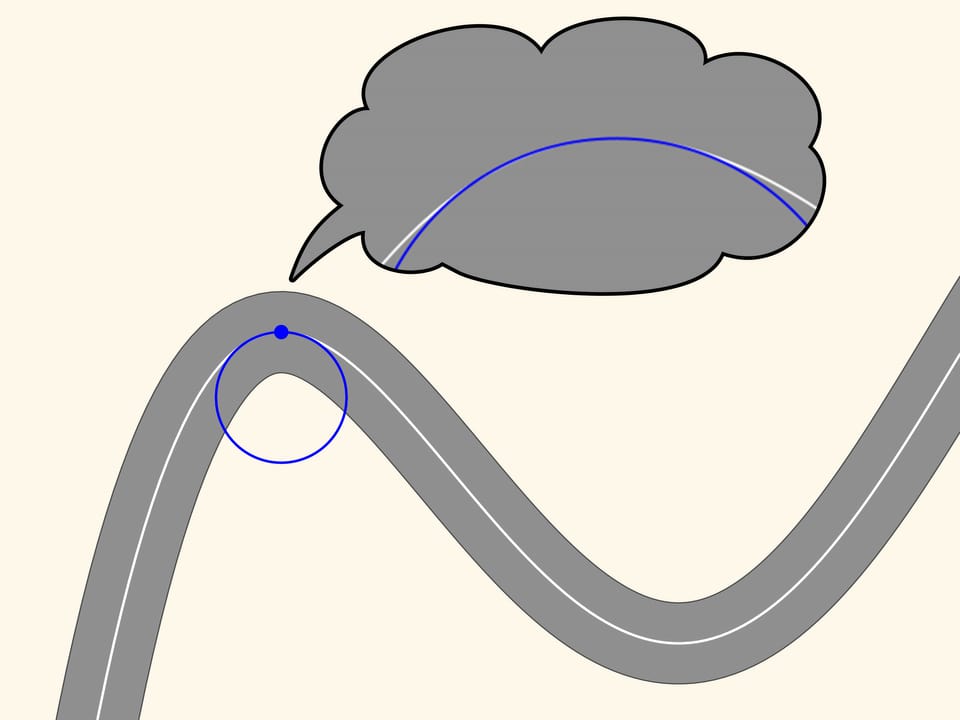
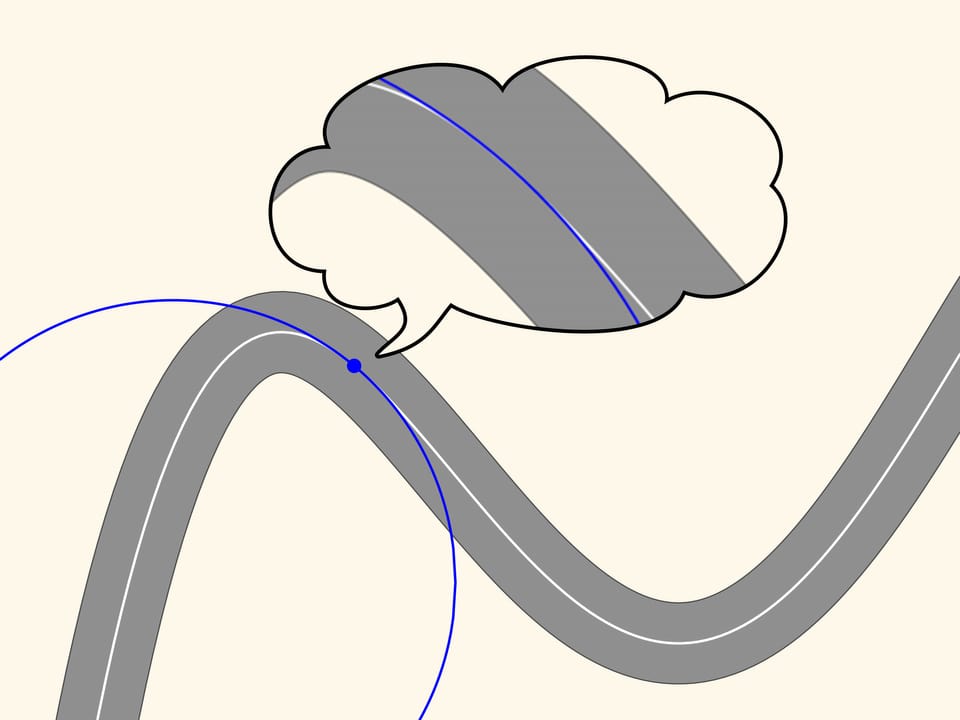
Так как соприкасающаяся окружность для нашей задачи хорошо приближает дорогу и может быть построена в любой её точке, то движение по изгибам дороги можно рассматривать в каждый момент времени как движение по дуге некоторой окружности. Мгновенные радиус и центр этой окружности зависят, конечно, от той точки, в которой находится машина.
Таким образом, при движении в произвольном повороте можно считать, что в каждый момент времени машина движется по небольшой дуге некоторой окружности. И наш первый случай — поворот машины по дуге окружности — основной, который и нужно изучать.
Но как достичь того, чтобы при любом повороте колёс продолжение осей смотрело в мгновенный центр поворота?
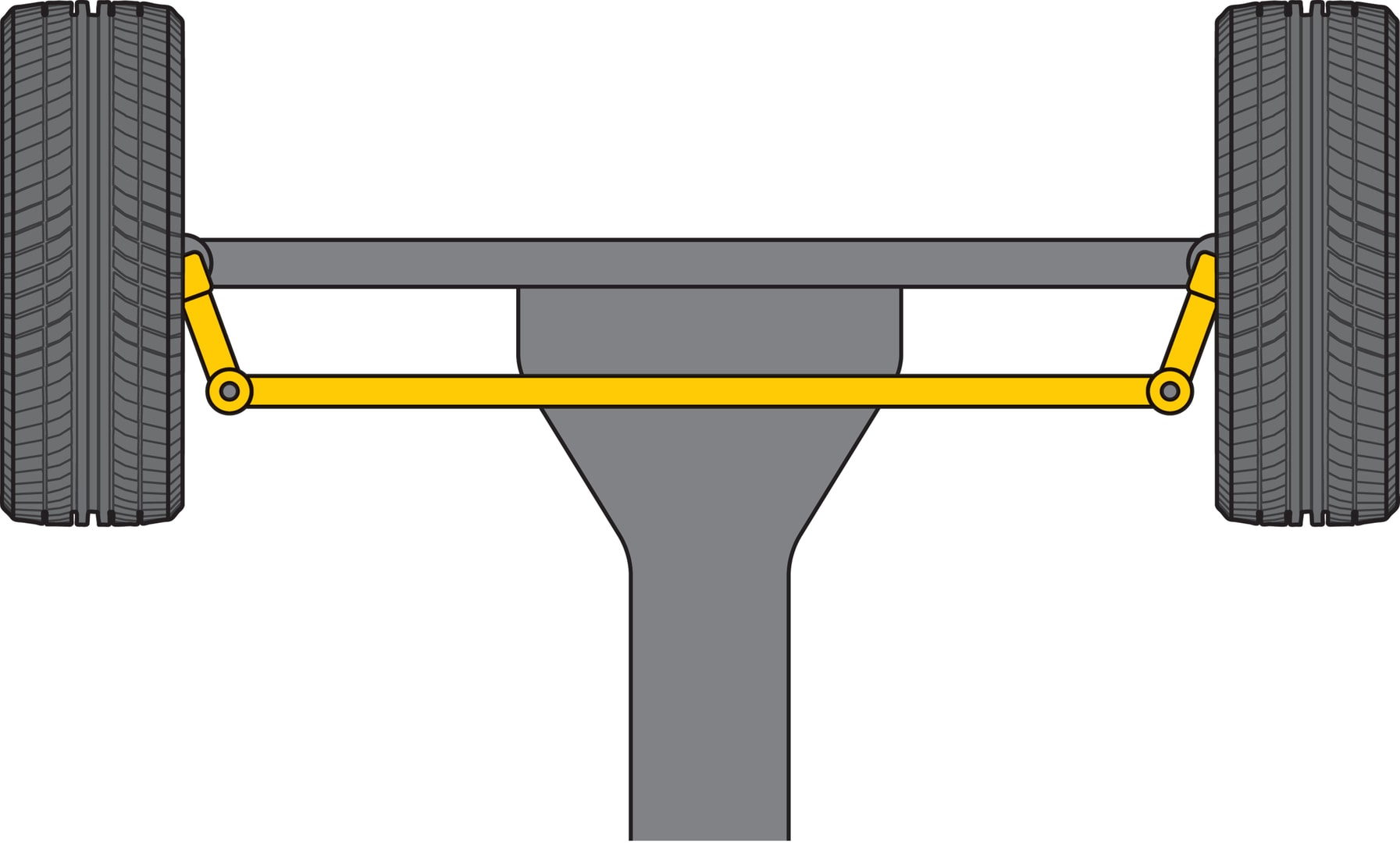
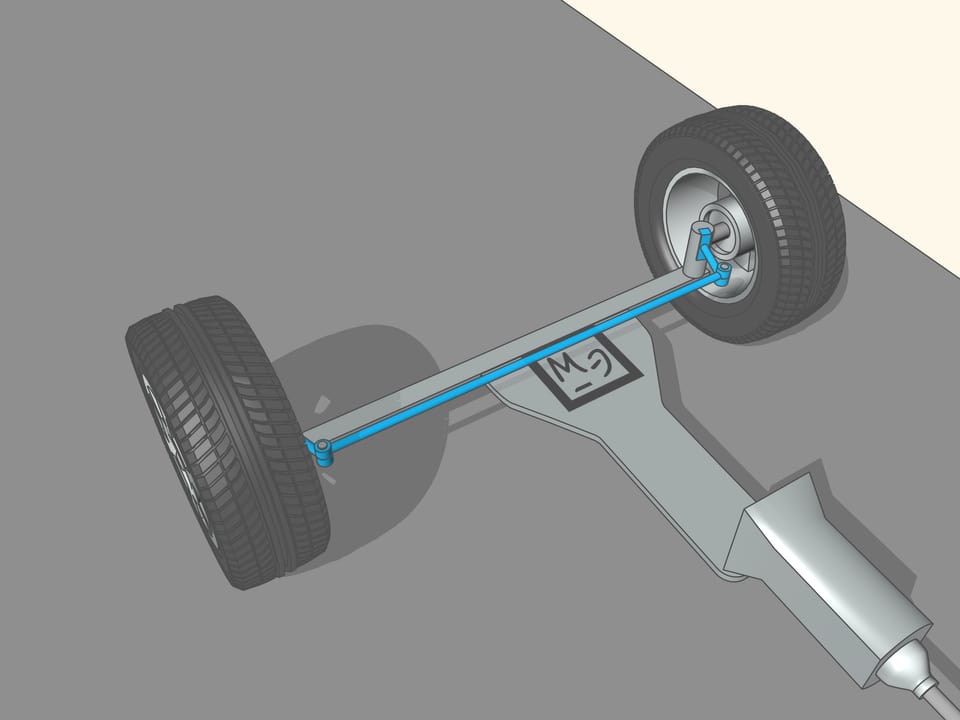
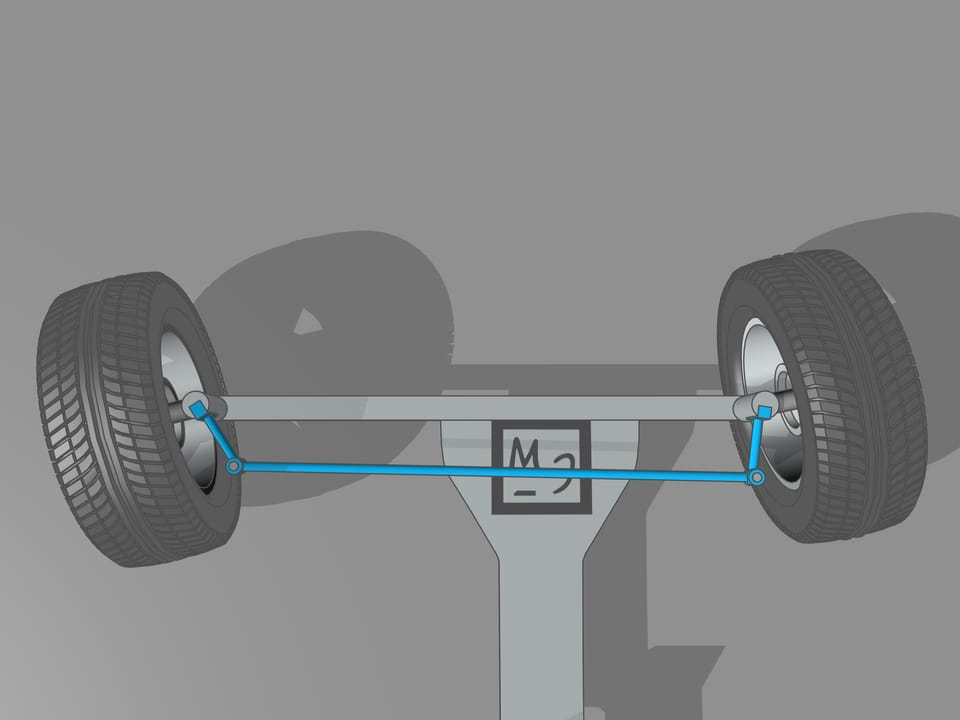
Оказывается, и здесь на помощь приходит геометрия, а именно известная со школы равнобокая трапеция — четырёхугольник, у которого две стороны, называемые основаниями, параллельны между собой, а боковые стороны равны друг другу. Если правильно подобрать размеры сторон трапеции, то достигается небоходимое для хорошего управления условие — продолжение осей передних колёс пересекается в точке, лежащей на продолжении оси задних колёс. Эта точка и есть мгновенный центр поворота машины.
Придумал такое управление передними колёсами француз, каретных дел мастер Шарль Жанто (Charles Jeantand). Однако для карет, передвигавшихся с малыми скоростями, это было не так существенно, как для машин, и изобретение Жанто было забыто. Лишь почти через три четверти века два отца автомобилестроения, два немца, два инженера — Готтлиб Даймлер (Gottlieb Wilhelm Daimler) и Карл Бенц (Karl Friedrich Michael Benz) — изобретая свои автомобили, возвращаются к трапеции Жанто. В 1889 году Даймлер получает патент на «способ независимого управления передними колёсами с разновеликими радиусами поворота». А в 1893 году Бенц получает патент на «устройство управления экипажей с тангенциальными к колёсам окружностями управления». Решив задачу управления передними поворотными колёсами и другие важные технические вопросы, Карл Бенц строит свой первый знаменитый четырёхколёсный автомобиль «Виктория».
С точки зрения строгой математики, трапеция не позволяет достичь необходимого условия — чтобы продолжение осей передних колес при любом повороте пересекалось в точке, лежащей на продолжении задней оси. При использовании трапеции эта точка будет всегда лежать чуть-чуть в стороне от линии задней оси. Зачем же мы столько обсуждали трапецию, скажете вы? Расстраиваться рано — просто не надо бездумно переносить математическую строгость в технические вопросы. Чтобы точка пересечения линий передних осей всегда лежала на линии задней оси, необходимо, чтобы длина меньшего основания трапеции немного менялась. При общей длине этого основания более метра необходимые изменения длины составляют всего около одного сантиметра, а это меньше чем люфты в соединениях и разрешённые допуски при изготовлении.
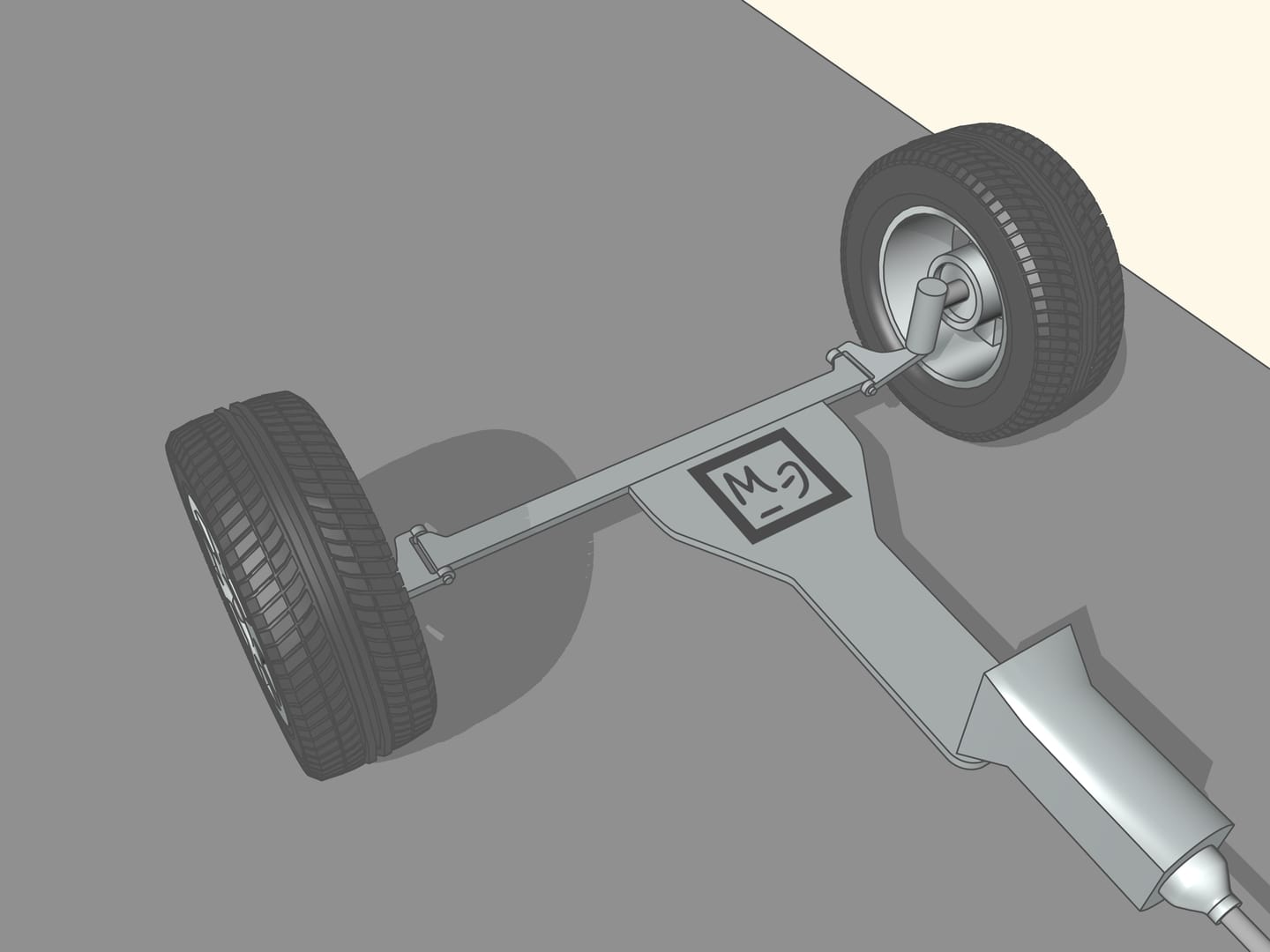
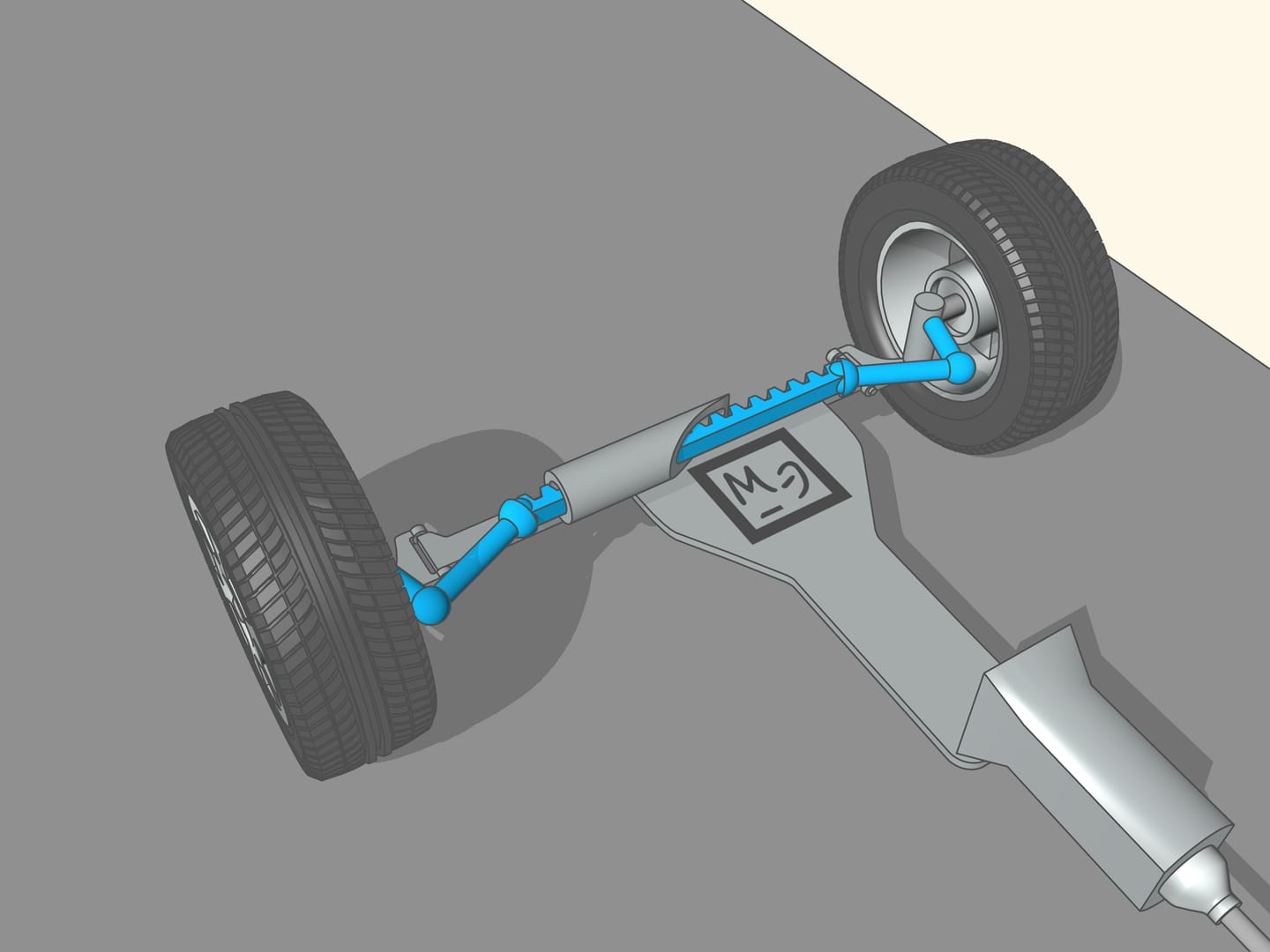
Со времён изобретения первых автомобилей скорости передвижения сильно возросли. Увеличились и требования к управлению передними колёсами. Кроме того, трапеция — это плоская геометрическая фигура. И такой способ управления передними колёсами может использоваться только при зависимой передней подвеске — когда колёса жёстко связаны друг с другом и прямая, соединяющая их центры, всегда параллельна плоскости трапеции. Сейчас такое можно встретить на грузовых автомобилях. На современных легковых автомобилях подвеска колёс независима, т. е. они могут ходить по высоте друг относительно друга. Для управления в повороте такими колёсами применяются более сложные, уже неплоские шарнирные механизмы, чаще всего с центральным звеном в виде рулевой рейки. Но их расчёт — это тоже задача математиков и механиков. А исторически они так по-прежнему и называются — рулевой трапецией.
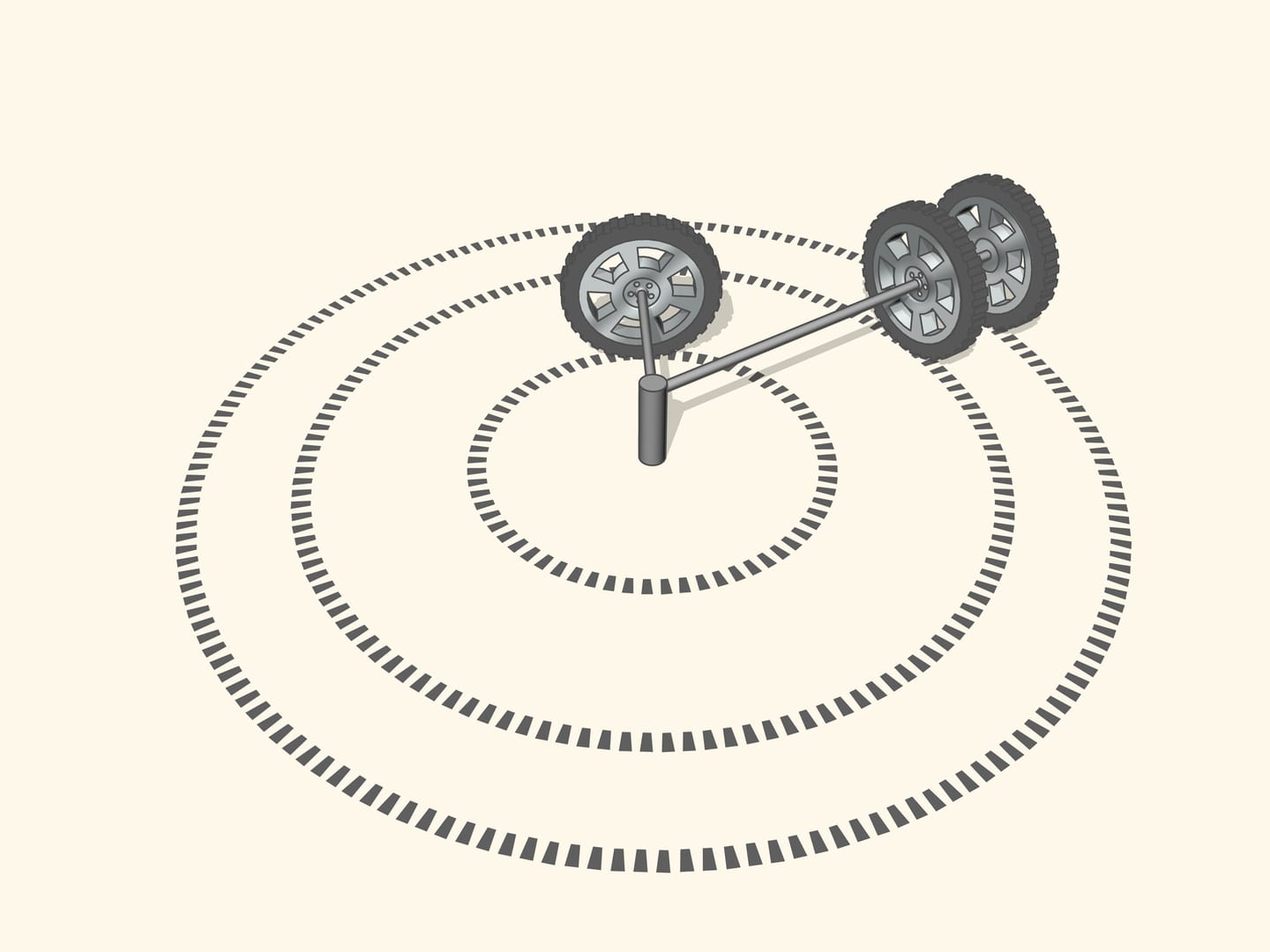
При повороте автомобиля возникает ещё один вопрос, связанный с геометрией. Длина окружности радиуса R равна, как вы помните, 2πR. Соответственно, длина дуги, опирающейся на угол α окружности радиуса R, равна αR. При повороте автомобиля по дуге окружности внешнее переднее колесо едет по дуге окружности большего радиуса, чем внутреннее переднее. Точно так же и заднее внешнее колесо описывает дугу большего радиуса, чем внутреннее заднее. А раз радиусы различаются, то, значит, пути, проходимые внутренним и внешним колёсами одной оси, должны быть тоже различны. В противном случае колесо будет проскальзывать, и управляемость автомобиля снизится.
В случае, когда ось неведущая, т. е. её колёса не толкают автомобиль вперёд, всё просто: каждое колесо вертится со своей скоростью, необходимой для прохождения нужного пути без проскальзывания.
А как же сделать так, чтобы колёса ведущей оси, в нашем случае задней, с одной стороны, постоянно толкали автомобиль вперёд, а с другой стороны, могли вращаться с разными скоростями?
Помогает в этом дифференциал — представитель планетарных механизмов. Планетарным называется механизм, у которого есть сателлиты — шестерни, крутящиеся вокруг подвижных осей.
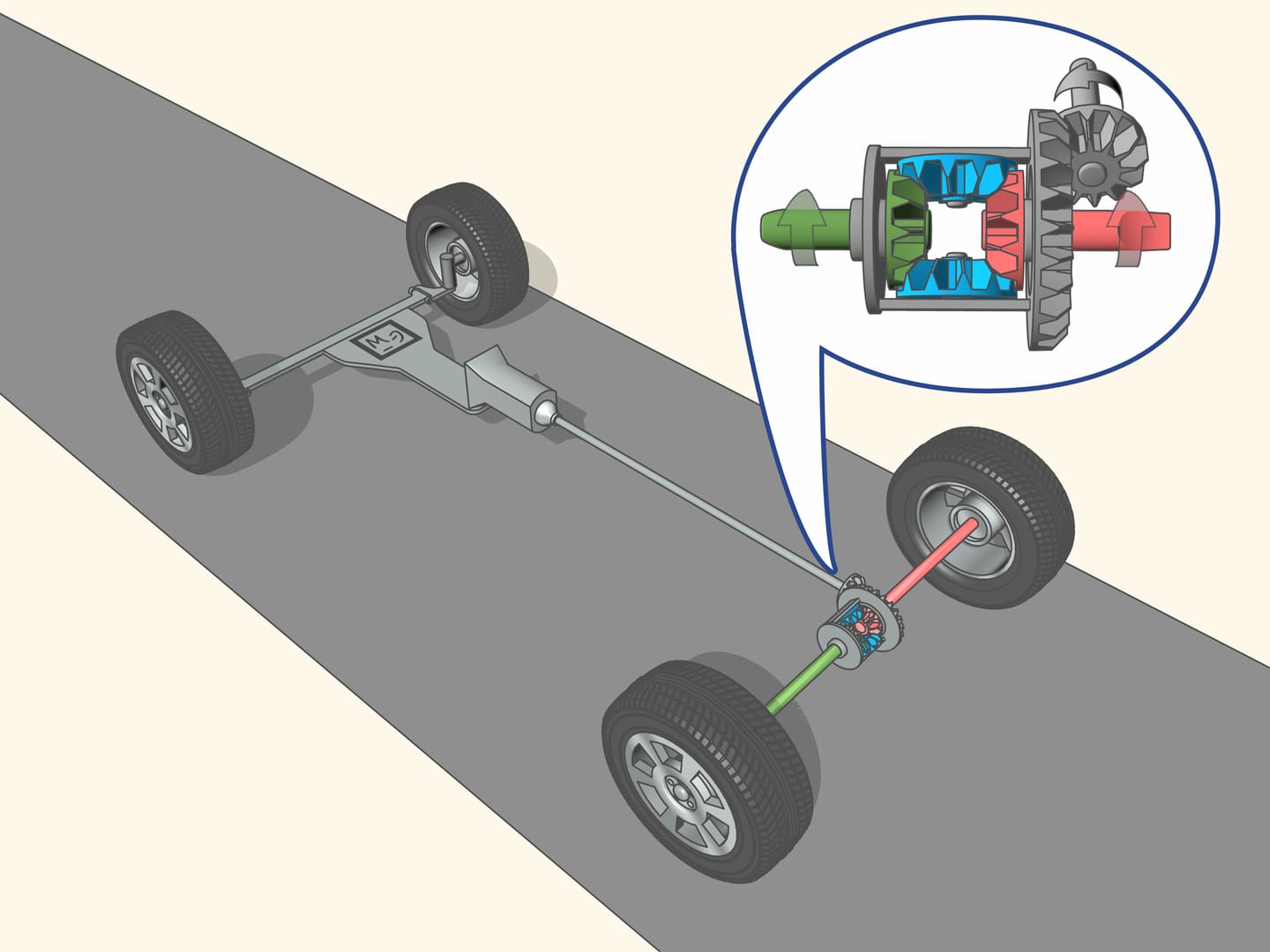
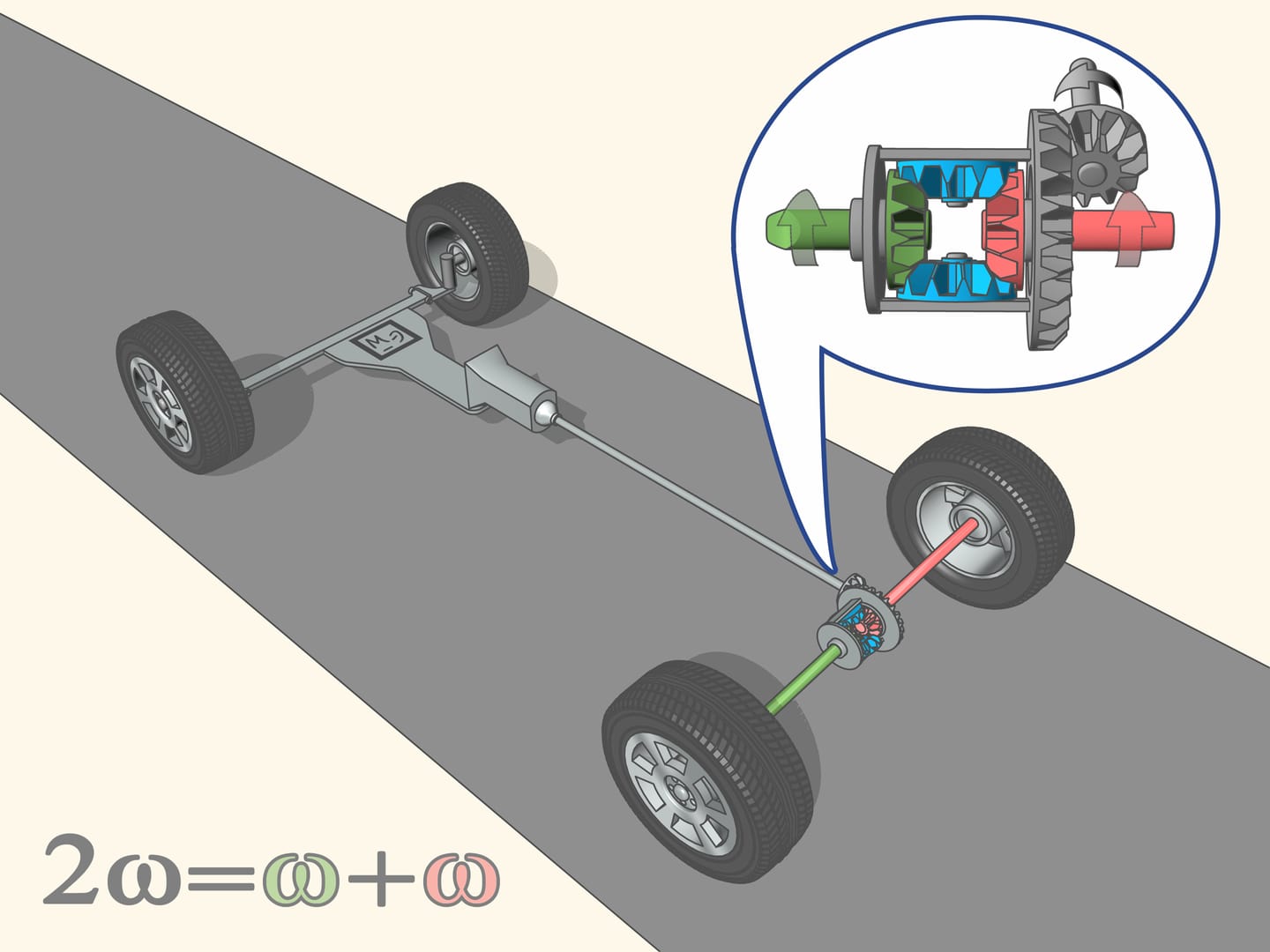
Вал от мотора, пройдя через коробку передач, отдаёт вращение на «бочку». Бочка же через сателлиты передаёт вращение на левую и правую полуоси ведущей оси. Как бы ни вращались колёса, скорость бочки всегда в два раза медленнее вращения вала, а сумма скоростей полуосей равна удвоенной скорости вала.
Если машина едет по прямой и под обоими ведущими колёсами одинаковое покрытие — с одинаковым коэффициентом трения, то колёса забирают от бочки одинаковое количество вращения, и полуоси вращаются (колёса и их полуоси) с одинаковой скоростью.
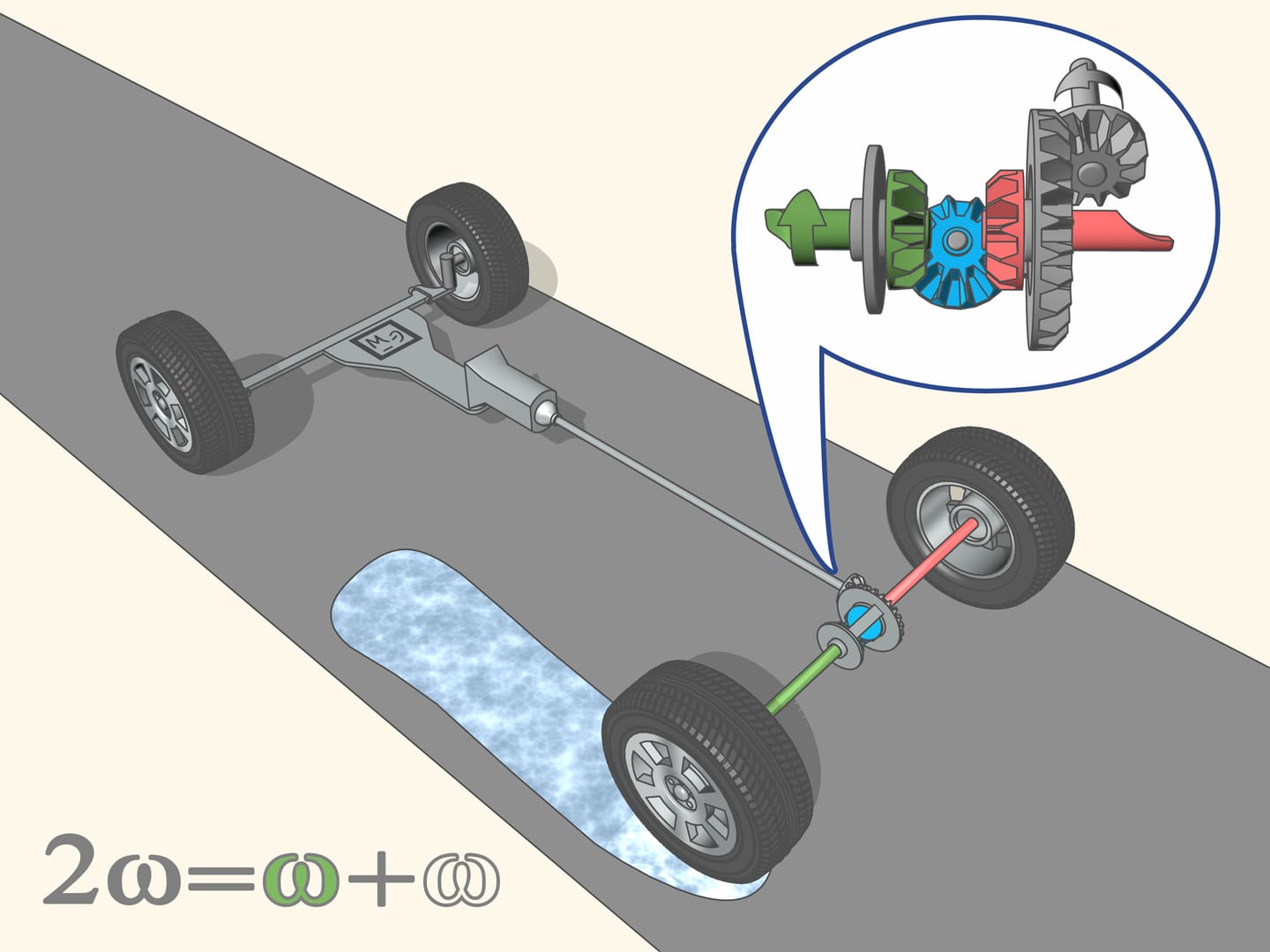
Но если коэффициенты трения различаются, например, одна сторона машины выезжает с асфальта на грунтовую обочину или попадает на лёд, то. Как же будут себя вести колёса при прохождении этого участка? У колёс неведущей оси всё просто: они независимы друг от друга, им не надо толкать машину, и когда одно из них выкатывается на лёд, то перестаёт крутиться, так как трение с дорогой очень маленькое.
Вот и под левое колесо ведущей оси попадает лёд. Справа трение с асфальтом большое, а слева — со льдом — почти отсутствует. Соответственно, левому колесу вращаться гораздо проще, и оно начинает забирать на себя всё вращение, отдаваемое бочкой на обе полуоси. При этом сумма скоростей полуосей, как было отмечено выше, всегда постоянна, но одна полуось не крутится, а вторая — вращается очень быстро. Начать движение из такого положения, когда одно колесо ведущей оси потеряло связь с дорогой (например, находится на льду), а другое нет — невозможно.
Казалось бы, одни неудобства от этого дифференциала, зачем он тогда нужен? Как раз для решения задачи одновременного толкания ведущей осью машины вперёд и прохождения в поворотах ведущими колесами путей разной длины. Каждое колесо берёт от дифференциала количество движения пропорционально длине его пути, а в сумме всю энергию вала они затрачивают на движение машины вперёд.
Инженеры постоянно пытаются улучшить дифференциал, сохранив его основное свойство, пытаются уменьшить неприятные эффекты — каким-либо способом не давать крутиться полуосям со слишком большой разницей скоростей. Но по сути, всё и сегодня остаётся таким же, ибо законы геометрии никто не отменял.
Смотри также
Поворот передних колёс автомобиля // Математическая составляющая / Ред.-сост. Н. Н. Андреев, С. П. Коновалов, Н. М. Панюнин. — Второе издание, расширенное и дополненное. — М. : Математические этюды, 2019. — С. 54—55, 306.
Как сделать поворот колес
что значит поворот? Руль чтоль?
Не знаю как правильно назвать (я имел ввиду чтобы передние колеса влево-вправо поворачивалась).
Видимо речь идет о установки сервопривода?!
Видимо речь идет о установки сервопривода?!
Вот в точку мне только сервопривод сделать осталось!Помогите пожалуйста.
Вот нечто похожее народ обсуждет.
У меня сложилось ощущение, что дело это крайне непростое.
Не лучше ли купить готовую серву?
Мягкие_тапочки :
Вот нечто похожее народ обсуждет.
У меня сложилось ощущение, что дело это крайне непростое.
Не лучше ли купить готовую серву?
Серва у меня готовая мне надо , чтобы качалка передавала поворот на передние колёса ! Воть.
Серва у меня готовая мне надо , чтобы качалка передавала поворот на передние колёса ! Воть.
Нихрена не понял… Так серва у тебя есть или нет?

Вот тебе вид сверху самой распространенной телеги, обведи там что тебе нужно:
Мне надо чтоб серва (она у меня есть)передавала тягу на это место.
vk.com/veselkov222?z=photo35936263_286647556%2Falb…
т.е. тебе нужно соорудить конструкцию из рулевых тяг, так?
А теперь глянь на МАНУАЛ к этой машине и изучи как там что устроено. Потому, что мы не знаем что у тебя за машина (или заготовка).
тебе нужно соорудить конструкцию из рулевых тяг, так?
Вот мой корпус. Помогите соорудить конструкцию из рулевых тяг.
vk.com/veselkov222?z=photo35936263_286649977%2Fpho…
Есть какая-нибудь инструкция на эту тему?
в точку
Вот мой корпус. Помогите соорудить конструкцию из рулевых тяг.
vk.com/veselkov222?z=photo35936263_286649977%2Fpho…
По большому счету у тебя там и нет ничего кроме колес.
Привод полный или только задний?
Если полный то геморой полный :)Вот можеш теорию взять отсюда
www.rcdesign.ru/articles/auto/hm_chassis
А по теме тебе нужны нижние рычаги,верхние,поворотные кулаки,Ц-хабы/деталюка куда крепится кулак,полуоси,амортизаторы…
Если полный привод,плюс ко всему приводы передних колес,диф,
Не проще в барахолке взять б/у модель дешовую,там и вникнеш в конструкцию всего,может и пройдет желание собрать из ничего что то ��
Вот мой корпус. Помогите соорудить конструкцию из рулевых тяг.
vk.com/veselkov222?z=photo359. photos35936263
Судя по толщине шестеренок, модель будет или ездить медленно и печально, или быстро — но оооочень недолго.
Мягкие_тапочки :
Судя по толщине шестеренок, модель будет или ездить медленно и печально, или быстро — но оооочень недолго.
Минут 20 со скоростью 40 км/ч
в точку
Вот мой корпус. Помогите соорудить конструкцию из рулевых тяг.
vk.com/veselkov222?z=photo35936263_286649977%2Fpho…
Подожди немножко все сооружают тебе конструкции, потом выберешь ту что понравится!
а пока ждешь расскажи на кой было создавать отдельную тему для одного вопроса?? у тебя уже есть чудная тема о посторойке этого чудовища , чего там не спросить.
ну и еще блин не нужно быть инженером чтобы протянуть две тяги от сервы на колеса. что может быть проще.
это не чудовище и конструкцию рулевых тяг я уже почти сделал
что может быть проще.
В 14 это действительно может быть не тривиально…
Про новую тему — да, перебор. Каждый день генерят по 2-3 темы ни о чем…
конструкцию рулевых тяг я уже почти сделал
Фото в студию. Но что-то мне подсказывает, что еще 2-3 раза переделывать придется.
это не чудовище и конструкцию рулевых тяг я уже почти сделал
сомнительно…
понимаешь тебе сказали как нужно сделать, НО ты проигнорировал это и сделал все по свойму…и что получилось?
А получилось нечто вырезанное из игрушки с ужасающим редуктором от той же игрушки, пласмассовыми колесами, отсутствием подвески,отсутствием какой либо электроники, даже если она есть подозреваю что она не совсем подходящая для авто.
И каков итог?? Затраченные силы непонятно на что, даже если каким то чудом ты все это дособерешь и оно заработает, то это будет ползать со скоростью черепахи,жудко греметь, не управляться, и развалится через 5 мин езды… и зачем это.
А можно было послушать советы, и сделать нормальную модель , при этом получить удовольствие от сборки,изучения, ну и в конце концов от катания на ней .
ну а если не хочешь то к чему вопросы? ты все равно не слушаешь ответы на них…
сомнительно…
понимаешь тебе сказали как нужно сделать, НО ты проигнорировал это и сделал все по свойму…и что получилось?
А получилось нечто вырезанное из игрушки с ужасающим редуктором от той же игрушки, пласмассовыми колесами, отсутствием подвески,отсутствием какой либо электроники, даже если она есть подозреваю что она не совсем подходящая для авто.
И каков итог?? Затраченные силы непонятно на что, даже если каким то чудом ты все это дособерешь и оно заработает, то это будет ползать со скоростью черепахи,жудко греметь, не управляться, и развалится через 5 мин езды… и зачем это.
А можно было послушать советы, и сделать нормальную модель , при этом получить удовольствие от сборки,изучения, ну и в конце концов от катания на ней .
ну а если не хочешь то к чему вопросы? ты все равно не слушаешь ответы на них…
вот я задумался поговорил с друзьями и друг отдал мне свой старый игрушечный джип довольно большой электронику нормальную заказал правдо аппаратура не для авто но эта машинка мне очень нравиться если кто-то хочет посмотреть могу выложить фотки в эту тему