Механика робота на контроллере ESP32 с 2 шаговыми моторами и памятью команд (траектории движения)
Собираем робота на двух шаговых моторах с передним/задним вращающимся колесом.
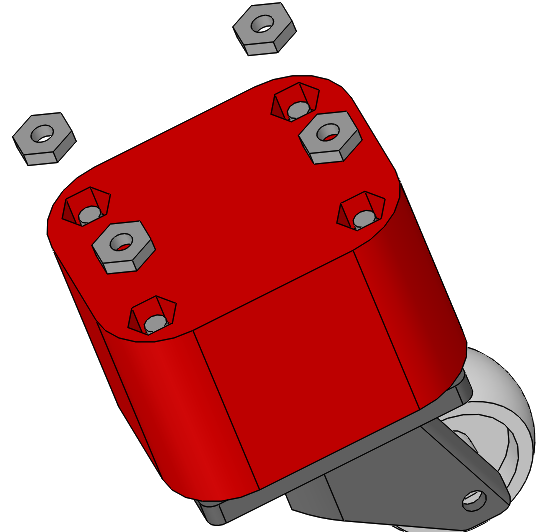
В результате полной сборки получится робот изображенный на следующей паре рисунков:
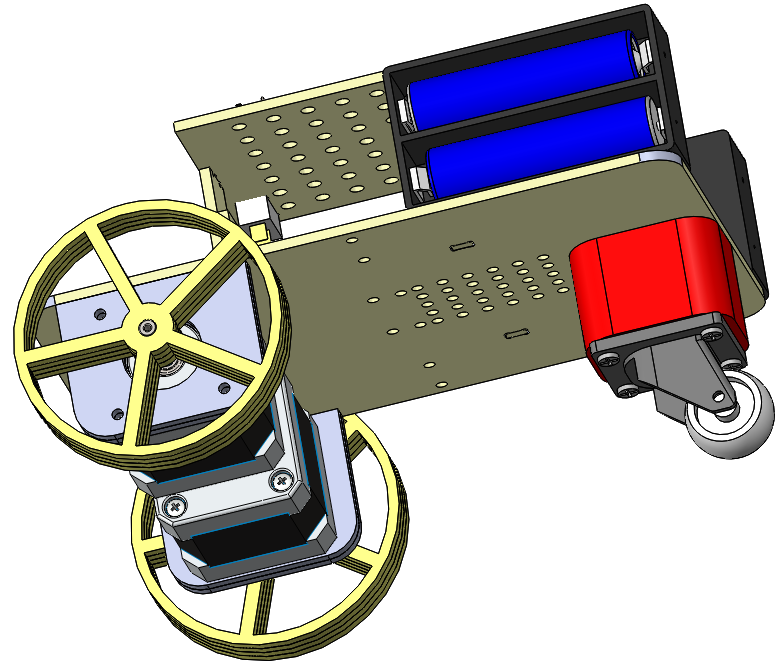
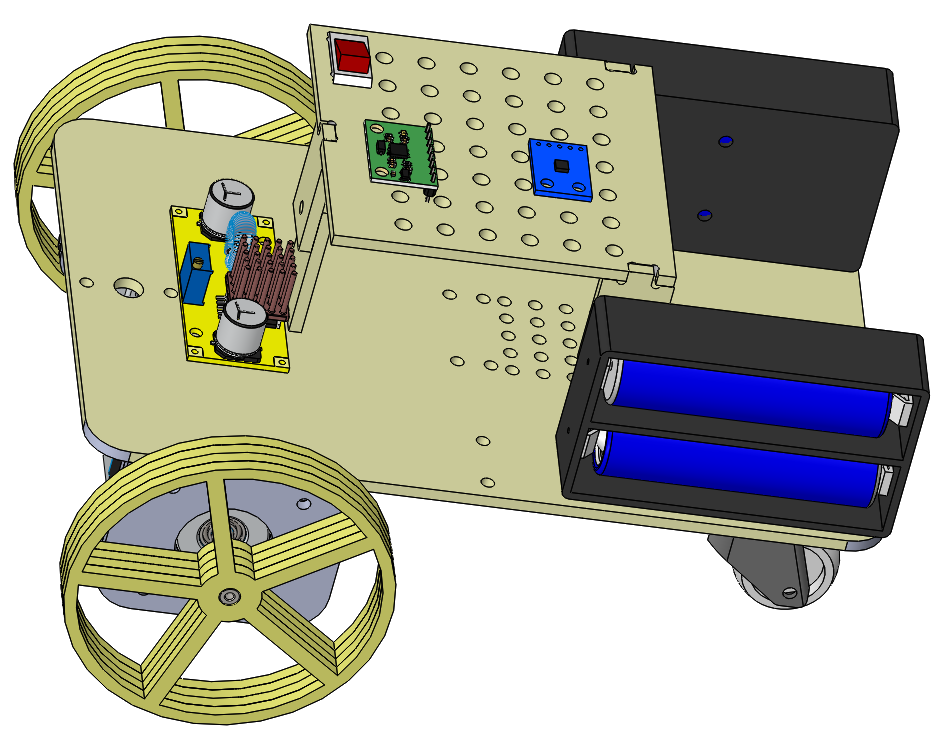
В состав робота помимо электроники входят следующие стандартные части:
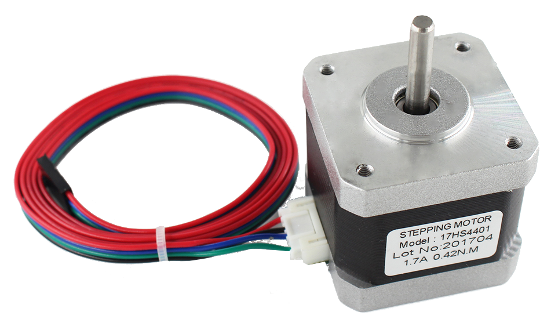
- пара шаговых моторов 17HS4401;
- свободно вращающееся колесо с на поворотной оси;
- пара аккумуляторных боксов (по 2шт 18650).


Подготовим стандартные компоненты и займемся сборкой корпуса робота.
Сборка корпуса робота производится на основе базы, к которой крепится все остальное. База имеет технологические отверстия для крепления стоек и прокладки проводов.
Установим на базу верхний уровень, он служит для расположения электроники и выключателя.
Стойки к верхнему уровню клются суперклеем или при помощи термопистолета (термоклеем).
Аналогично устанавливаем и закрепляем клеем стойки в отверстия базы.
Скрепляем верхние и нижние стойки между собой 3мм винтами длиний 10-15мм.
Третье свободное колесо крепиться через переходную тумбу, которая служит для нормализации высоты третьего колеса.
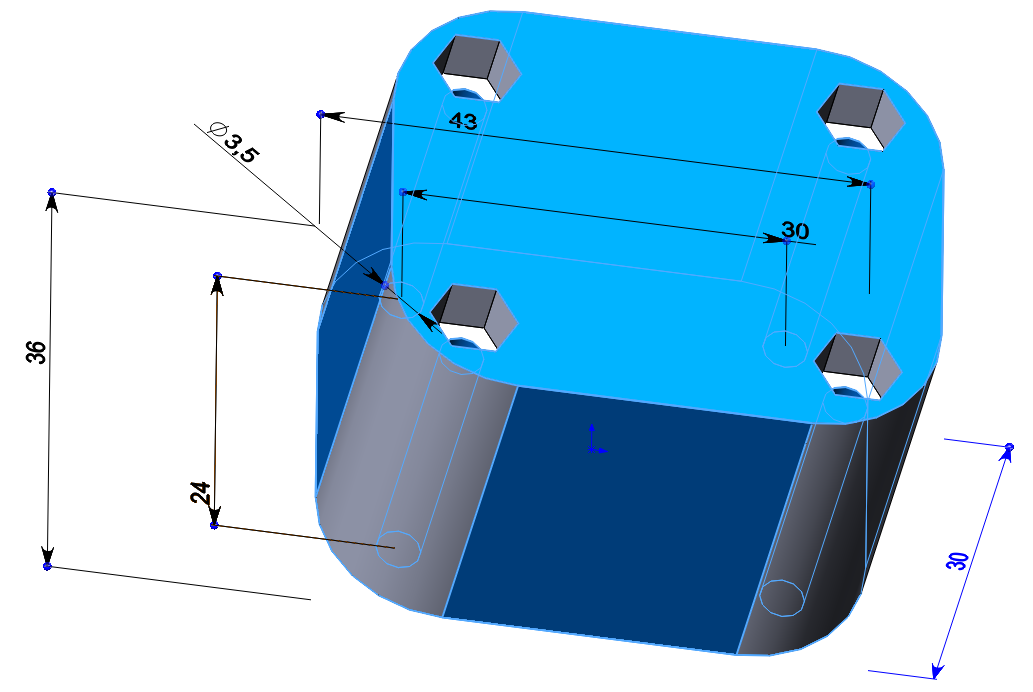
Следует использовать 3мм винты длиной 30мм.
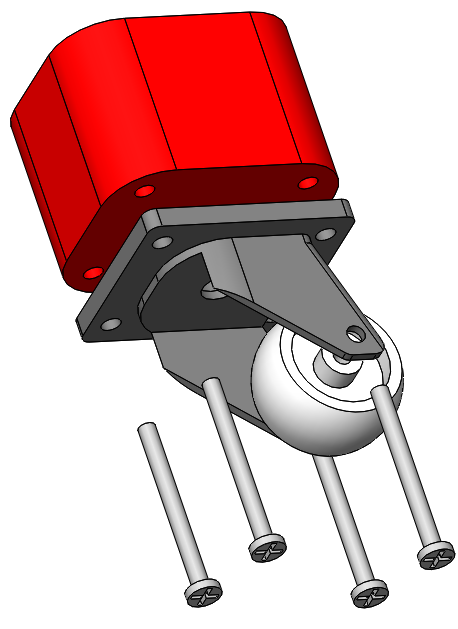
Тумба крепится к базе суперклеем строго по центру передней стороны.
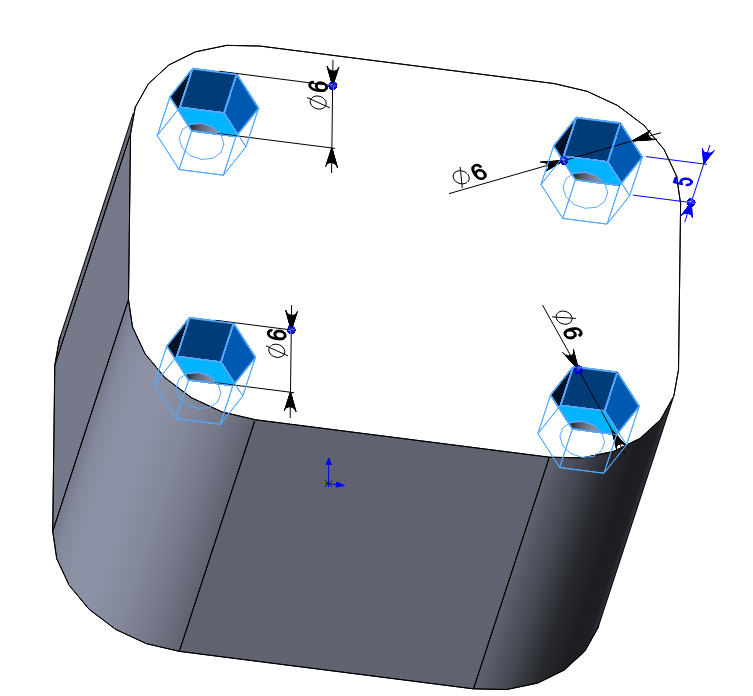
Шаговые двигатели крепятся винтами к соответвующим стойкам, для прочности стойки из 3мм фанеры склеены по две.
Стойки фиксируются на корпусе суперклеем с содой, как показано на рисунке.
Двигатели закрепляются на стойках при помощи 4х винтов диаметром 3мм и длиной 12-13мм.
Колеса собираются из четырех 3мм слоем для создания ширины колеса (12мм). Полученное широкое колесо обрамляется шиной из пористой резины.
Колесо насаживается на ось. К сожалению прочность насадки не гарантирует отсутствие вращения колеса на оси, чтобы этого избежать следует капнуть суперклей между осью и отверстием колеса.
Теперь можно установить боксы для аккумуляторов, для того чтобы сбалансировать распределение массы робота, боксы выносятся в переднюю часть и крепяться на суперклей с осодой или термоклей.
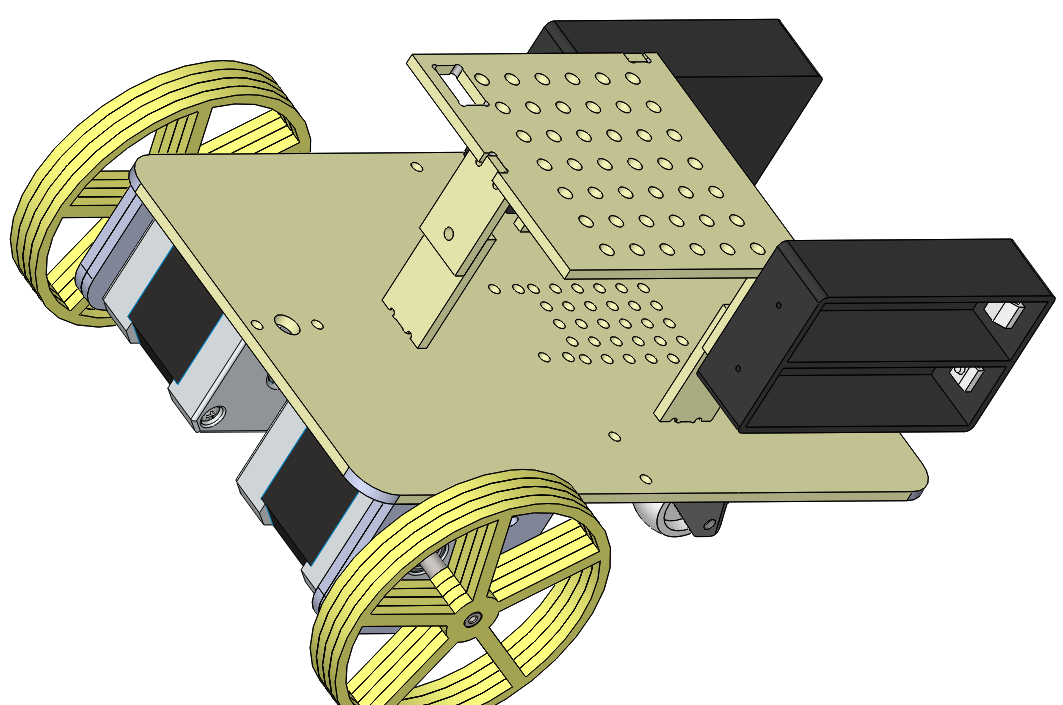
Корпус робота готов, пора приступать к монтажу электроники и драйверов.
Робототехника как прикрепить колесо к двигателю
Добрый день всем! Я абсолютный новичок что касается rc-моделей, занимаюсь полностью автономными роботами (близко к Ардуино, но разница есть).
Есть вопрос что нужно, что надеть на робота колёса от rc-модели.
Робот идёт со скоростью где-то 3-10 км/час, время от времени делая резкие повороты (радиусом 5-10 см), что достигается тем, что у него только три точки опоры и только два колеса связанных с двигателями — я резко могу полностью стопорить одно колесо чтобы обеспечить такой поворот. Колёса сейчас посажены на 3мм валы двигателей. Покрытие колёс — силикон, твёрдость 20-30, робот ездит по гладкой трассе из синтетической баннерной ткани.
Помогите, плз, со следующими вопросами:
- Нужны колёса с высоким сцеплением и, как я понимаю, довольно мягкие и с минимальным протектором, диаметром 30-40мм. Где лучше искать такие, для каких моделей используются подобные? Я смотрел mini-z formula — там колёса несколько меньше. У раллийных машин 1:18 в основном несколько больше. Посоветуйте, плз;
- У моих роботов стоят мотор-редукторы и я не имею пока опыта монтажа самодельного редуктора на модели, так что идея была надеть новые колёса прямо на d-образный 3мм вал мотор-редуктора. Где можно найти информацию по нужным для этого переходникам? Или может я иду не тем путём и мне имеет смысл собрать более сложную конструкцию, чтобы закрепить колёса на роботе?

Вот робот:
Буду благодарен за любой совет.
Или может я иду не тем путём и мне имеет смысл собрать более сложную конструкцию, чтобы закрепить колёса на роботе?[/IMG]
Буду благодарен за любой совет.
Ну если за любой �� Тогда ловите.
С роботами не имел дела, но подобные шасси приходится делать часто. Мне кажется вы идете совсем не правильным путем.
- колеса нельзя сажать на вал двигателя. Они должны иметь свою опору, хотя бы сделать просто насадку на вал но которая стоит на подшипниках на раме
- для таких целей лучше колеса изготовить самостоятельно с возможностью менять резиновую вставку. Самый простой вариант это 2 детали — диск с посадкой на ось и обод, фиксирующий резиновую шину. Если требуется быстрая смена колес, то надо добавит ступицу и крепить диск уже к ней. Причем на ступице можно уже предусмотреть шестигранник или иное устройство для установки стандартных колес.
- резиновую шину тоже лучше резать из листового материала что бы точно подобрать материал, ширину, диаметр, жесткость и т.п. Есть материалы не просто имеющие хорошее сцепление, а буквально прилипающие к любой поверхности. Насколько я знаю, штатных колес таких нет. Кроме того, если резать материал шины, то можно сделать любую форму внешней части для зацепа(например мелкие ребра) либо сложной внутренней формы что бы моделировать увод шины, настраивать ее реакцию на резкие торможения и повороты.
По сути вам нет смысла связываться с готовыми изделиями, они не из той оперы…я проходил все это на свое шкуре и теперь полностью перехожу от траты денег на стандарт, на оригинальные решения которые обходятся в разы дешевле.
Кроме того, вам можно обратить внимание на 3Д принтеры. По сути вы можете все кроме шин изготовить на нем. Детали у вас махонькие так что цены должны быть мизерные.
Но если все это не подходит, то могу порекомендовать посмотреть колеса от Лоси 1\24 www.losi.com/Products/Start.aspx
Если интересно, то могу завтра все промерить. Там посадка схожая, именно D но диаметр вала не помню. Диаметр колес различный но примерно в вашем диапазоне.
Если вдруг будете в Москве или г.Домодедово, то можете приехать померить. Могу даже на время тестов одолжить комплектик.
1 месяц спустя
Юрий, не подскажите, из чего можно изготовить “самоприлипающие” шины для робота -сумо диаметр шины 30-40 мм ширина 15-25 мм, вроде льют из силикона, есть ли более подходящий материал?
Мотор-редуктор колесо с резиновой шиной

Пластиковый мотор-редуктор колесо с резиновой шиной — предназначен для использования в подвижных платформах и роботах. Вал с обеих сторон редуктора, что позволяет установить оптический или магнитный энкодер. Который помогает определять угол поворота и пройденное расстояния колесом. Мотор с колесом для Arduino, очень популярен в роботостроении и самодельных дистанционно управляемых конструкциях.
Характеристики:
- Напряжение питания: 3 .. 6 В
- Обороты холостого хода: 200 об/мин
- Ток холостого хода: 120 мА
- Ток при остановленном колесе: 500 мА
- Крутящий момент: 5.5 kg/cm
- Ширина колеса 27 мм
- Диаметр колеса 70 мм
- Вес: 50 г
- Размер: 70 × 27 × 23 мм
Тест электродвигателя с колесом:
| Вес | 65 г |
| Цвет | желтый |
Мотор-редуктор колесо с резиновой шиной отзывы
Покупатели, которые приобрели Мотор-редуктор колесо с резиновой шиной, также купили
Комплект соединительных.
Драйвер моторов MX1508
HC-SR04 Ультразвуковой.
SG90 Сервопривод
Arduino Nano 3.0
Набор резисторов 0,25 Вт -.
Нет в наличии
Arduino Motor Shield v.2 -.
Нет в наличии
Датчик препятствий
Сервопривод MG90S
Нет в наличии
OV7670 Arduino камера
Нет в наличии
Забористые колёса

Давно уже мы ломали голову как порадовать общественность (и себя=) доступным и качественным движителем для роботов. Ничего не выходило — готовые компоненты — слишком дорого, заказывать производство — тоже не бюджетно выходило, самим делать из не предназначенных для этого деталей — получается жуткий колхоз.
И вот после долгой и безуспешной борьбы с сервами, стеклоподъёмниками, шуруповёртами, колёсами от роликовых коньков, мебели и ещё чёрт знает от чего, когда мы уже сдались — закупили дорогие мотор-редукторы, крепёж и колёса…Совершенно неожидано, братья-коммунисты решили проблему с перевыполнением плана=)
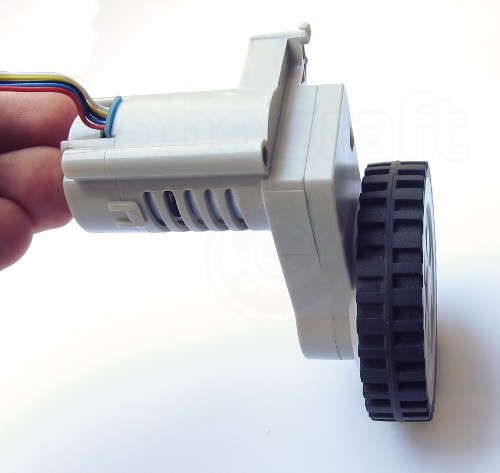
Встречайте — колёсный узел от китайского робота-пылесоса!
Это законченный агрегат с 12 вольтовым мотором, металлическим редуктором, энкодером, с симпатичным колесом в цепкой резиновой покрышке, с подвеской и датчиком отрыва от пола! Причём всё это весьма приличного качества.
Ниже всё подробно, с разборкой и большим количеством фоток.
Есть колёса левые и правые — отличаются зеркально. Далее рассматривать будем левое
Разглядим внешне: 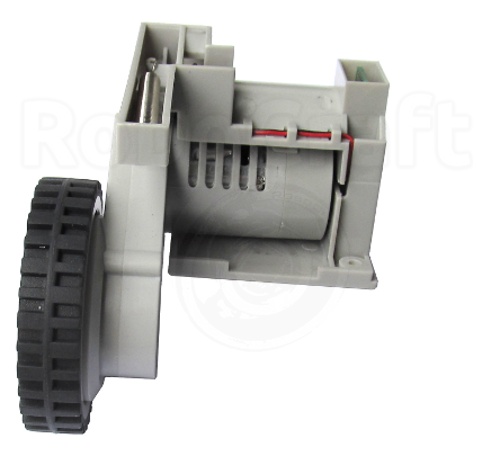



Состоит агрегат из двух частей — «мотоблока» (двигатель-редуктор-колесо)и «корпуса» в котором всё это подвешено и закреплён разъём.
Мотоблок качается на оси закреплённой в «корпусе» так, что колесо ходит вверх-вниз. В свободном состоянии пружина в верхней части корпуса сжата и оттопыривает мотоблок создавая максимальный «клиренс» — 33мм.
Если на корпус нажать то пружина сжимается — получается своего рода подвеска=) 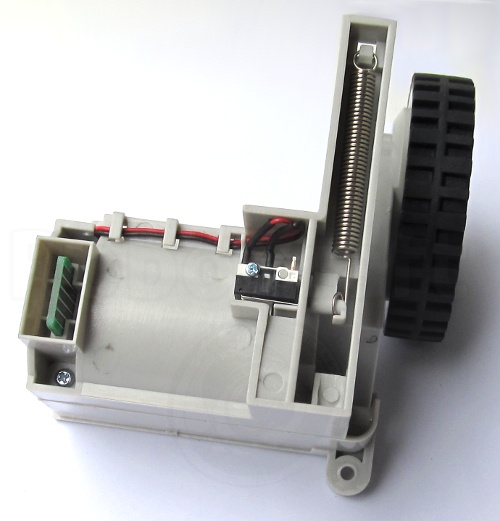
Растягивается полностью пружина под весом 1.2кг и тогда просвет становится 13мм. Для не слишком тяжёлых роботов — сойдёт за подвеску для езды по коврам и порожкам.
При полностью оттопыренном колесе — замыкается микрик в верхней части корпуса — датчик отрыва от пола.
Так что можно выключать дисковые пилы своего робота-убийцы когда его поднимают(или наоборот включать…). А можно сделать чтобы он орал дурным голосом требуя вернуть его на землю =)
Снаружи всё ясно, начнём ковырять! Первым делом снимаем заглушки колпаки с колёсных болтов. 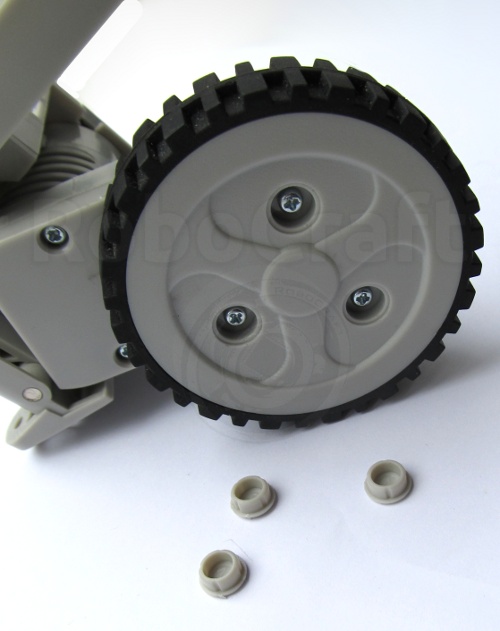
Очень меня повеселила такая обстоятельная конструкция колеса=)Дальше больше!
Крутим три винта обнаруживаем, что диски у нас не просто литьё, а ещё и разборные: 
Резина низкопрофильная, мягкая, а чтоб не проворачивалась на дисках — сидит на «штифтах» 
Вывинчиваем ещё три винта, снимаем вторую часть диска и видим что проворот на оси колесу не угрожает — держится оно не только на винтах но ещё и на массивных выступах стальной ступицы. 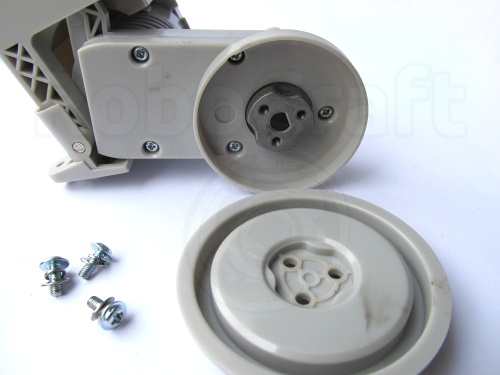
Не китайский запас прочности=)
Снимаем крышку редуктора и опять удивляемся — пластиковые шестерёнки не высыпаются на стол, отнюдь! 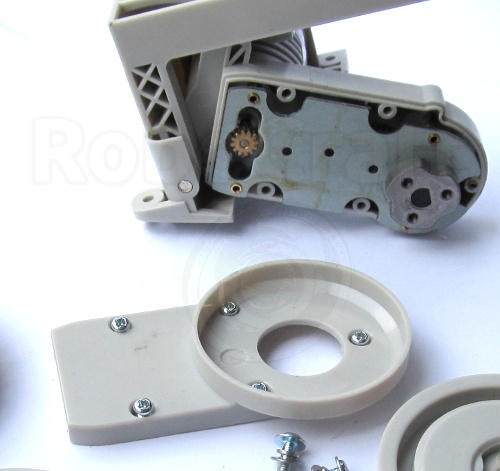
Там опять всё из металла и пластмассой только прикрыто=)
Редуктор не разборный — заклёпан между двумя толстыми стальными пластинами и надёжно прикручен к металлическому корпусу двигателя. 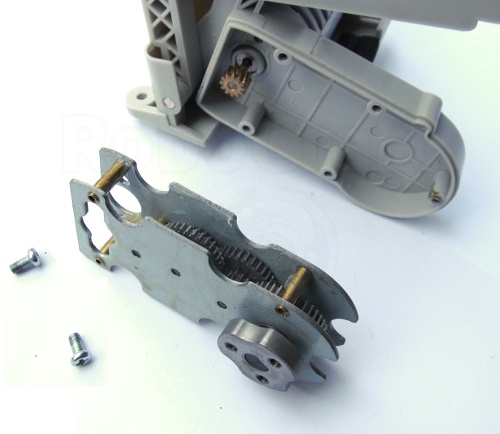

Всё обстоятельно, капитально и аккуратно — наверно делали пленные немцы…
У редуктора только одна шестерня пластиковая — вторая (на самом моторе — латунная) — наверно для демпфирования, в сервах такое, говорят, встречается. 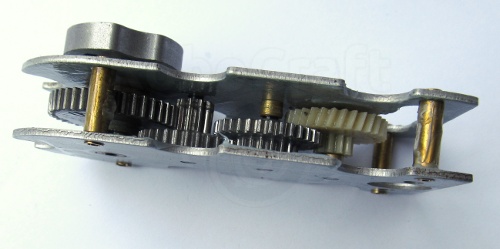
Выходная шестерня со ступицей сидит вот в таких массивных бронзовых втулках 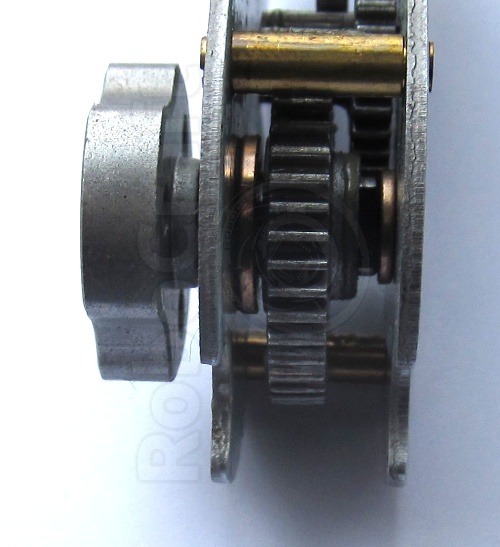
Хотелось бы шариковые подшипники но это было бы уже слишком=)
Так, с редуктором разобрались, приятно поудивлялись, полезем дальше.
Нужно разнять «мотоблок» и «корпус» — «располовинить»=)
Это оказалось весьма непросто — ось запрессована очень туго — пришлось жестоко выбивать, на удивление без последствий. Так же надо вывернуть два винта по бокам от разъёма и аккуратно снять пружину 
Корпус разнимается на верхнюю и нижнюю половины. 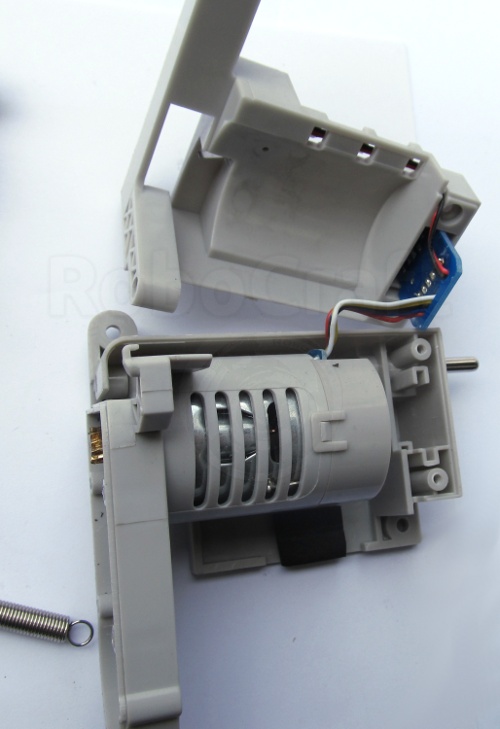
Виден крючок для пружины на мотоблоке и пазы для платы разъёма в нижней части корпуса.
Никакого термоклея и стяжек — даже провод от микрика проложен в специальном канале=)
Если поднатужиться и выбить-вытянуть ось ещё дальше — можно отделить мотоблок от корпуса. 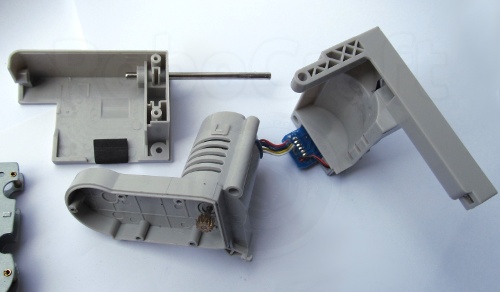
Провода к разъёму не ахти какие гибкие и наверное могут со временем поломаться, если активно использовать подвеску — время покажет.
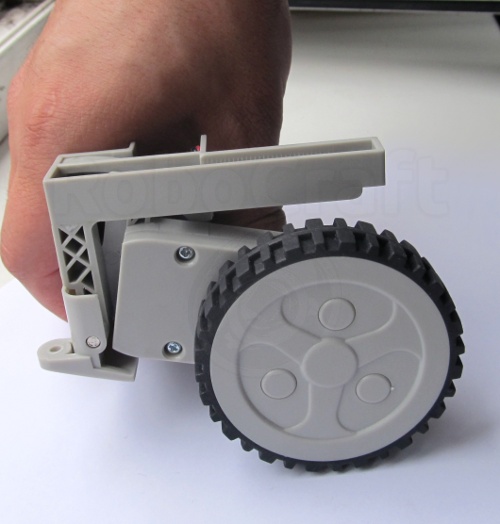
Кстати, со снятым корпусом открывается ещё одна замечательная возможность использования этого агрегата.
Кого смущает низкая посадка колёсного узла в сборе, могут его закрепить вот в таком виде 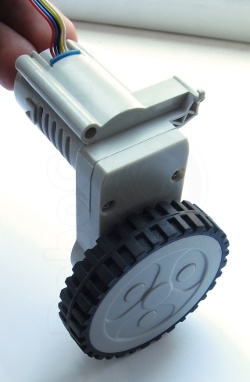
Можно сделать как здесь.
Ковыряем дальше мотоблок.
Снимаем заднюю крышку и видим энкодер 
стянем кодирующий диск (16 просветов) 
под ним обнаруживается оптика и недурственный фильтр 
Отпаяем плату и удивимся ещё раз — фильтрец полнейший! 
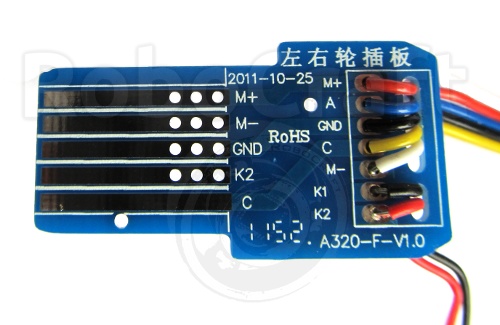
кстати вот схема этой платы — обозначены провода приходящие на плату разъёма 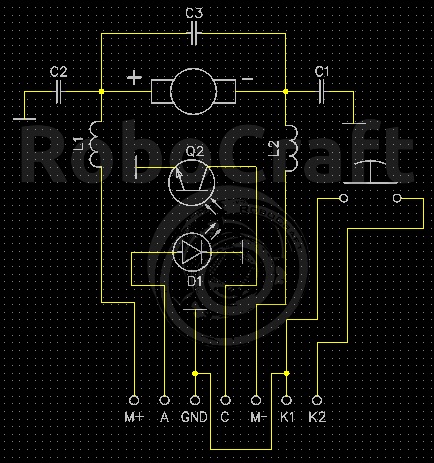
Двигатель снабжён честными медно-угольными щётками (а не трёт по коллектору латунными лепестками, как бывает в дешёвых движках) 
Мотоблок в полном разборе 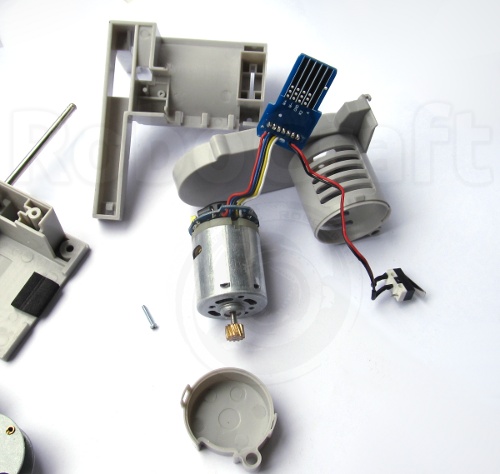
Плата-разъём, контакты «желтого металла», всё подписано=) 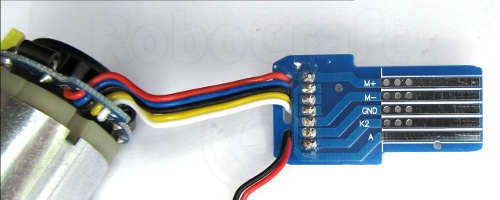
Обратите внимание, что на плате разъёма один из выводов микрика-датчика отрыва соединён с землёй(см схему)
Распиновка: 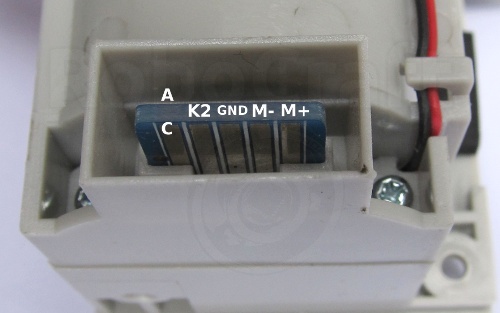
Пока мы в поисках правильной ответной части на этот разъём, замечу что шаг у него 2.54
и на него прекрасно напаивается кусочек PLD-шки (5х2). Совершенно без разборки, для удобства можно срезать часть пластмассы 
Эстеты впоследствии могут стянуть пластмаску с PLD-шки натянуть туда пластмаску от IDC10-MS 
В общем вот такая вот загагулина.
Работает негромко, резина тянет прилично. Крутится колесо начинает от 3В но тормозиться при этом слишком легко, при 12В на холостых вертится ~90об/мин и тормозиться рукой с ощутимым трудом.
Зато измерили момент — при 12В поднимает до 1.7кг вертикально(на колесо намотана верёвка с подвешенным грузом.) Тесть крутящий момент на валу приблизительно 6кгсм(диаметр колеса 68мм).
Как всё это выглядит в динамике:
Сколхозили за 15минут телегу — скорость проверить. Просто батарея на моторы.
Скорость ползания с грузом в 3,8кг на 12В вышла около 0,29м/с.
- Двигатель — коллекторный постоянного тока
- Напряжение питания 12В (видимо)
- Ток ХХ 60мА (при 12В)
- Ток заторможенного 1,05А (при 12В)
- Подшипники выходного вала — два, скольжения.
- Передаточное отношение ~1/63
- Обороты ХХ (на выходном валу редуктора) 90об/мин
- Момент (на выходном валу редуктора) 6кгс*см
- за оборот двигателя — 16 импульсов
- за оборот колеса — 1000 импульсов
- Диаметр колеса 68мм
- Ширина 15мм
- клиренс 13-33мм
- выжимается при 1,2кг на колесо
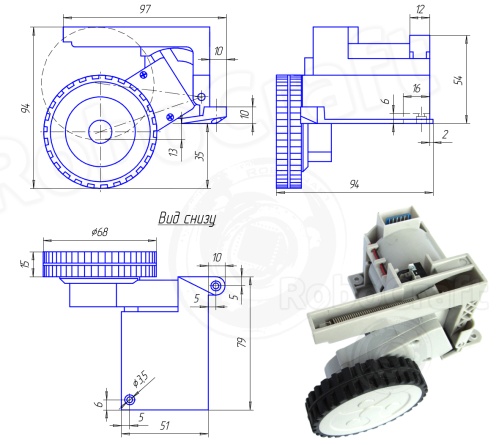
А на закуску — чертёж
Ну и наконец — купить это чудо восточной мысли и инженерии можно в нашем магазине.