Работа с Arduino и MPU6050

Статья обновлена Добавил всякой документации, исправил старые примеры и добавил новые. Спасибо за активность! × Закрыть это предупреждение.
MPU6050 представляет собой 3-х осевой гироскоп и 3-х же осевой акселерометр в одном корпусе. Сразу поясню, что это и для чего:
- Гироскоп измеряет угловую скорость вращения вокруг оси, условно в градусах/секунду. Если датчик лежит на столе – по всем трём осям будет значение около нуля. Для нахождения текущего угла по скорости нужно интегрировать эту скорость. Гироскоп может чуть привирать, поэтому ориентироваться на него для расчёта текущего угла не получится даже при идеальной калибровке.
- Акселерометр измеряет ускорение вдоль оси, условно в метрах/секунду/секунду. Если датчик лежит на столе или движется с постоянной скоростью – на оси будет спроецирован вектор силы тяжести. Если датчик движется с ускорением – вдобавок к ускорению свободного падения получим составляющие вектора ускорения. Если датчик находится в свободном падении (в том числе на орбите планеты) – величины ускорений по всем осям будут равны 0. Зная проекции вектора силы тяжести можно с высокой точностью определить угол наклона датчика относительно него (привет, школьная математика). Если датчик движется – однозначно определить направление вектора силы тяжести не получится, соответственно угол тоже.
Модуль стоит в районе 150 рублей на нашем любимом AliExpress (ссылка, ссылка), а также входит в Arduino набор GyverKIT.
Итак, по отдельности акселерометр и гироскоп не могут обеспечить точное измерение угла, но вместе – ещё как могут! Об этом мы поговорим ниже. А начнём с подключения и базового общения с датчиком.
Подключение
Датчик подключается на шину i2c (SDA -> A4, SCL -> A5, GND -> GND). На плате стоит стабилизатор, позволяющий питаться от пина 5V (VCC -> 5V).
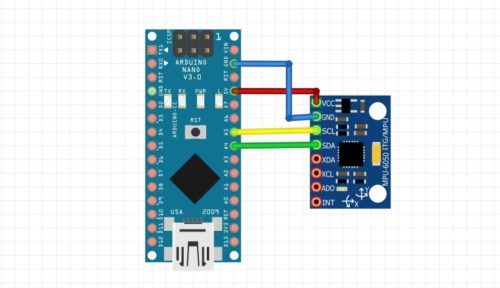
На модуле выведен пин AD0. Если он никуда не подключен (или подключен к GND) – адрес датчика на шине i2c будет 0x68, если подключен к питанию (VCC) – адрес будет 0x69. Таким образом без дополнительных микросхем можно подключить два датчика на шину с разными адресами.
Получение сырых данных
С MPU6050 можно общаться напрямую при помощи встроенной библиотеки Wire.h и даташита, а можно взять очень мощную библиотеку от i2cdev: официальный сайт (на момент написания не работает) или GitHub. Для работы понадобится сама библиотека MPU6050 и библиотека I2Cdev (удобного способа скачать там нет, поэтому выложил архив с обеими на Яндекс.Диск). Мы будем работать с библиотекой, но я оставлю пример опроса всех ускорений и угловых скоростей напрямую, т.к. библиотека тяжёлая, а пример очень лёгкий.
Опрос вручную по i2c
#include "Wire.h" const int MPU_addr = 0x68; // адрес датчика // массив данных // [accX, accY, accZ, temp, gyrX, gyrY, gyrZ] // acc - ускорение, gyr - угловая скорость, temp - температура (raw) int16_t data[7]; void setup() < // инициализация Wire.begin(); Wire.beginTransmission(MPU_addr); Wire.write(0x6B); // PWR_MGMT_1 register Wire.write(0); // set to zero (wakes up the MPU-6050) Wire.endTransmission(true); Serial.begin(9600); >void loop() < getData(); // получаем // выводим for (byte i = 0; i < 7; i++) < Serial.print(data[i]); Serial.print('\t'); >Serial.println(); delay(200); > void getData() < Wire.beginTransmission(MPU_addr); Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H) Wire.endTransmission(false); Wire.requestFrom(MPU_addr, 14, true); // request a total of 14 registers for (byte i = 0; i < 7; i++) < data[i] = Wire.read() >
Опрос через библиотеку i2cdev
#include «MPU6050.h» MPU6050 mpu; int16_t ax, ay, az; int16_t gx, gy, gz; void setup() < Wire.begin(); Serial.begin(9600); mpu.initialize(); // состояние соединения Serial.println(mpu.testConnection() ? "MPU6050 OK" : "MPU6050 FAIL"); delay(1000); >void loop()
Библиотека MPU6050 от i2cdev
Эта библиотека является одной из самых сложных в Ардуино-среде, да и сам датчик чего стоит – 50 страниц даташита + 50 страниц с описанием регистров и настроек… А в библиотеке – несколько сотен (!) функций для работы с модулем и его многочисленными настройками. Рассмотрим самые “нужные”, которые точно пригодятся в работе:
Методы для MPU6050
// ============== ГИРОСКОП ============== // получить угловые скорости по осям int16_t getRotationX(); int16_t getRotationY(); int16_t getRotationZ(); void getRotation(int16_t* x, int16_t* y, int16_t* z); // получить диапазон гироскопа // 0 = +/- 250 degrees/sec // 1 = +/- 500 degrees/sec // 2 = +/- 1000 degrees/sec // 3 = +/- 2000 degrees/sec uint8_t getFullScaleGyroRange(); // установить диапазон гироскопа в формате // MPU6050_GYRO_FS_250 // MPU6050_GYRO_FS_500 // MPU6050_GYRO_FS_1000 // MPU6050_GYRO_FS_2000 void setFullScaleGyroRange(uint8_t range); // ============== АКСЕЛЕРОМЕТР ============== // получить ускорения по осям int16_t getAccelerationX(); int16_t getAccelerationY(); int16_t getAccelerationZ(); void getAcceleration(int16_t* x, int16_t* y, int16_t* z); // получить диапазон акселя // 0 = +/- 2g // 1 = +/- 4g // 2 = +/- 8g // 3 = +/- 16g uint8_t getFullScaleAccelRange(); // установить диапазон акселя в формате // MPU6050_ACCEL_FS_2 // MPU6050_ACCEL_FS_4 // MPU6050_ACCEL_FS_8 // MPU6050_ACCEL_FS_16 void setFullScaleAccelRange(uint8_t range); // ============== ВСЯКОЕ ============== // получить ускорение, угловую скорость void getMotion6(int16_t* ax, int16_t* ay, int16_t* az, int16_t* gx, int16_t* gy, int16_t* gz); // получить температуру int16_t getTemperature(); // перезагрузить void reset(); // управление режимом сна bool getSleepEnabled(); void setSleepEnabled(bool enabled); // ============== ПРЕРЫВАНИЕ СВОБОДНОГО ПАДЕНИЯ ============== // порог датчика свободного падения 0..255. Одна единица - 2mg uint8_t getFreefallDetectionThreshold(); // получить порог void setFreefallDetectionThreshold(uint8_t threshold); // установить порог // время определения свободного падения 0..255. Одна единица - 1мс uint8_t getFreefallDetectionDuration(); // получить время void setFreefallDetectionDuration(uint8_t duration); // установить время // прерывание bool getIntFreefallEnabled(); void setIntFreefallEnabled(bool enabled); // ============== ПРЕРЫВАНИЕ ДВИЖЕНИЯ ============== // порог датчика движения 0..255. Одна единица - 2mg uint8_t getMotionDetectionThreshold(); // получить порог void setMotionDetectionThreshold(uint8_t threshold); // установить порог // время определения движения 0..255. Одна единица - 1мс uint8_t getMotionDetectionDuration(); // получить время void setMotionDetectionDuration(uint8_t duration); // установить время // прерывание bool getIntMotionEnabled(); void setIntMotionEnabled(bool enabled); // ============== ПРЕРЫВАНИЕ ОТСУТСТВИЯ ДВИЖЕНИЯ ============== // порог определения отсутствия движения 0..255. Одна единица - 2mg uint8_t getZeroMotionDetectionThreshold(); // получить порог void setZeroMotionDetectionThreshold(uint8_t threshold);// установить порог // время определения отсутствия движения 0..255. Одна единица - 1мс uint8_t getZeroMotionDetectionDuration(); // получить время void setZeroMotionDetectionDuration(uint8_t duration); // установить время // прерывание bool getIntZeroMotionEnabled(); void setIntZeroMotionEnabled(bool enabled); // ============== ПРЕРЫВАНИЯ ============== // включить/выключить прерывания bool getInterruptMode(); void setInterruptMode(bool mode); // байт со всеми прерываниями. Настройка прерываний uint8_t getIntEnabled(); void setIntEnabled(uint8_t enabled); // статусы прерываний uint8_t getIntStatus(); bool getIntFreefallStatus(); bool getIntMotionStatus(); bool getIntZeroMotionStatus(); // ============== ОФФСЕТЫ ============== // установить. XYZ аксель, XYZ гиро void setXAccelOffset(int16_t offset); void setYAccelOffset(int16_t offset); void setZAccelOffset(int16_t offset); void setXGyroOffset(int16_t offset); void setYGyroOffset(int16_t offset); void setZGyroOffset(int16_t offset); // получить. XYZ аксель, XYZ гиро int16_t getXAccelOffset(); int16_t getYAccelOffset(); int16_t getZAccelOffset(); int16_t getXGyroOffset(); int16_t getYGyroOffset(); int16_t getZGyroOffset(); // вывести оффсеты в порт void PrintActiveOffsets(); void CalibrateGyro(uint8_t Loops = 15); // калибровать гиро(кол-во итераций) void CalibrateAccel(uint8_t Loops = 15); // калибровать аксель(кол-во итераций)
Расшифровка сырых данных
По каждой оси и параметру датчик выдаёт 16-битное знаковое значение ( -32768.. 32767 ). При стандартных настройках (как в примерах выше) это значение отражает:
- Ускорение в диапазоне -2.. 2 g (9.82 м/с/с).
- Угловую скорость в диапазоне -250.. 250 градусов/секунду.
Таким образом, для перевода сырых данных в величины СИ (если это нужно) можно сделать по каждой оси:
- Ускорение в м/с/с при чувствительности 2: float accX_f = accX / 32768 * 2
- Угловая скорость в град/с при чувствительности 250: float gyrX_f = gyrX / 32768 * 250
Думаю закономерность понятна.
Настройка чувствительности
Датчик позволяет настроить чувствительность по каждому параметру, в библиотеке i2cdev это делается так:
- setFullScaleAccelRange(MPU6050_ACCEL_FS_2); – диапазон -2.. 2 g
- setFullScaleAccelRange(MPU6050_ACCEL_FS_4); – диапазон -4.. 4 g
- setFullScaleAccelRange(MPU6050_ACCEL_FS_8); – диапазон -8.. 8 g
- setFullScaleAccelRange(MPU6050_ACCEL_FS_16); – диапазон -16.. 16 g
- setFullScaleGyroRange(MPU6050_GYRO_FS_250); – диапазон -250.. 250 град/с
- setFullScaleGyroRange(MPU6050_GYRO_FS_500); – диапазон -500.. 500 град/с
- setFullScaleGyroRange(MPU6050_GYRO_FS_1000); – диапазон -1000.. 1000 град/с
- setFullScaleGyroRange(MPU6050_GYRO_FS_2000); – диапазон -2000.. 2000 град/с
Ну и пример
void setup()
Перевести сырые данные можно таким же способом, как в предыдущем пункте, но с учётом нового диапазона.
Калибровка оффсетов
Для достижения максимальной точности измерений нужно откалибровать акселерометр и гироскоп. Калибровка акселерометра позволяет выставить “ноль” для вектора силы тяжести, а калибровка гироскопа уменьшает его “дрифт”, то есть статическое отклонение в режиме покоя. Идеально откалиброванный и лежащий горизонтально датчик должен показывать ускорение ~16384 по оси Z и нули по всем остальным осям ускорения и угловой скорости. Но это фантастика =)
Максимально правильно использовать калибровку в проекте нужно так: калибровка по запросу (кнопка, меню, и т.д.), затем запись калибровочных значений в EEPROM. При запуске – чтение и настройка оффсетов из. Рассмотрим несколько примеров калибровки.
Алгоритмы калибровки
Максимально правильно использовать калибровку в проекте нужно так: калибровка по запросу (кнопка, меню, и т.д.), затем запись калибровочных значений в EEPROM. При запуске – чтение и настройка оффсетов. Да, можно замерить значения по всем 6 осям в покое, сохранить их в переменные, а затем вычитать из свежих прочитанных в процессе работы. Такой способ работает для каких-то базовых операций с датчиком (определение перегрузок, тряски, наличия вращения, и т.д.). Для использования MPU6050 с целью максимально точного определения углов поворота платы такой вариант к сожалению не подходит: калибровать нужно рекурсивно.
Рассмотрим несколько примеров калибровки, первый – из библиотеки. Калибрует долго, но максимально точно. При малых вибрациях и движениях датчика в процессе калибровки (даже от громкого звука) калибровка может не закончиться. Второй вариант – мой упрощённый алгоритм калибровки, калибрует быстро, без возможности зависнуть при тряске, но даёт менее точный результат. Я делюсь примерами, в свой проект их нужно будет переносить вручную и аккуратно =)
Калибровка из примера библиотеки
// положи датчик горизонтально, надписями вверх // ДАЖЕ НЕ ДЫШИ НА НЕГО // отправь любой символ в сериал, чтобы начать калибровку // жди результатов // --------------------- НАСТРОЙКИ ---------------------- const int buffersize = 70; // количество итераций калибровки const int acel_deadzone = 10; // точность калибровки акселерометра (по умолчанию 8) const int gyro_deadzone = 6; // точность калибровки гироскопа (по умолчанию 2) // --------------------- НАСТРОЙКИ ---------------------- #include "I2Cdev.h" #include "MPU6050.h" #include "Wire.h" MPU6050 mpu(0x68); int16_t ax, ay, az, gx, gy, gz; int mean_ax, mean_ay, mean_az, mean_gx, mean_gy, mean_gz, state = 0; int ax_offset, ay_offset, az_offset, gx_offset, gy_offset, gz_offset; /////////////////////////////////// SETUP //////////////////////////////////// void setup() < Wire.begin(); Serial.begin(9600); mpu.initialize(); // ждём очистки сериал while (Serial.available() && Serial.read()); // чистим while (!Serial.available()) < Serial.println(F("Send any character to start sketch.\n")); delay(1500); >while (Serial.available() && Serial.read()); // чистим ещё на всякий Serial.println("\nMPU6050 Calibration Sketch"); delay(2000); Serial.println("\nYour MPU6050 should be placed in horizontal position, with package letters facing up"); delay(3000); // проверка соединения Serial.println(mpu.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed"); delay(1000); // сбросить оффсеты mpu.setXAccelOffset(0); mpu.setYAccelOffset(0); mpu.setZAccelOffset(0); mpu.setXGyroOffset(0); mpu.setYGyroOffset(0); mpu.setZGyroOffset(0); > /////////////////////////////////// LOOP //////////////////////////////////// void loop() < if (state == 0) < Serial.println("\nReading sensors for first time. "); meansensors(); state++; delay(1000); >if (state == 1) < Serial.println("\nCalculating offsets. "); calibration(); state++; delay(1000); >if (state == 2) < meansensors(); Serial.println("\nFINISHED!"); Serial.print("\nSensor readings with offsets:\t"); Serial.print(mean_ax); Serial.print("\t"); Serial.print(mean_ay); Serial.print("\t"); Serial.print(mean_az); Serial.print("\t"); Serial.print(mean_gx); Serial.print("\t"); Serial.print(mean_gy); Serial.print("\t"); Serial.println(mean_gz); Serial.print("Your offsets:\t"); Serial.print(ax_offset); Serial.print(", "); Serial.print(ay_offset); Serial.print(", "); Serial.print(az_offset); Serial.print(", "); Serial.print(gx_offset); Serial.print(", "); Serial.print(gy_offset); Serial.print(", "); Serial.println(gz_offset); Serial.println("\nData is printed as: acelX acelY acelZ giroX giroY giroZ"); Serial.println("Check that your sensor readings are close to 0 0 16384 0 0 0"); Serial.println("If calibration was succesful write down your offsets so you can set them in your projects using something similar to mpu.setXAccelOffset(youroffset)"); while (1); >> /////////////////////////////////// FUNCTIONS //////////////////////////////////// void meansensors() < long i = 0, buff_ax = 0, buff_ay = 0, buff_az = 0, buff_gx = 0, buff_gy = 0, buff_gz = 0; while (i < (buffersize + 101)) < // read raw accel/gyro measurements from device mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); if (i >100 && i if (i == (buffersize + 100)) < mean_ax = buff_ax / buffersize; mean_ay = buff_ay / buffersize; mean_az = buff_az / buffersize; mean_gx = buff_gx / buffersize; mean_gy = buff_gy / buffersize; mean_gz = buff_gz / buffersize; >i++; delay(2); > > void calibration() < ax_offset = -mean_ax / 8; ay_offset = -mean_ay / 8; az_offset = (16384 - mean_az) / 8; gx_offset = -mean_gx / 4; gy_offset = -mean_gy / 4; gz_offset = -mean_gz / 4; while (1) < int ready = 0; mpu.setXAccelOffset(ax_offset); mpu.setYAccelOffset(ay_offset); mpu.setZAccelOffset(az_offset); mpu.setXGyroOffset(gx_offset); mpu.setYGyroOffset(gy_offset); mpu.setZGyroOffset(gz_offset); meansensors(); Serial.println(". "); if (abs(mean_ax) >
Мой вариант калибровки
#include "Wire.h" #include "I2Cdev.h" #include "MPU6050.h" MPU6050 mpu; #define BUFFER_SIZE 100 int16_t ax, ay, az; int16_t gx, gy, gz; void setup() < Wire.begin(); Serial.begin(9600); mpu.initialize(); mpu.setXAccelOffset(0); mpu.setYAccelOffset(0); mpu.setZAccelOffset(0); mpu.setXGyroOffset(0); mpu.setYGyroOffset(0); mpu.setZGyroOffset(0); Serial.println(F("Send any character to start sketch")); delay(100); while (1) < //входим в бесконечный цикл if (Serial.available() >0) < //если нажата любая кнопка Serial.read(); //прочитать (чтобы не висел в буфере) break; //выйти из цикла >> delay(1000); > void loop() < // выводим начальные значения mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); Serial.print(ax); Serial.print(" "); Serial.print(ay); Serial.print(" "); Serial.print(az); Serial.print(" "); Serial.print(gx); Serial.print(" "); Serial.print(gy); Serial.print(" "); Serial.println(gz); calibration(); // выводим значения после калибровки mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); Serial.print(ax); Serial.print(" "); Serial.print(ay); Serial.print(" "); Serial.print(az); Serial.print(" "); Serial.print(gx); Serial.print(" "); Serial.print(gy); Serial.print(" "); Serial.println(gz); delay(20); while (1); >// ======= ФУНКЦИЯ КАЛИБРОВКИ ======= void calibration() < long offsets[6]; long offsetsOld[6]; int16_t mpuGet[6]; // используем стандартную точность mpu.setFullScaleAccelRange(MPU6050_ACCEL_FS_2); mpu.setFullScaleGyroRange(MPU6050_GYRO_FS_250); // обнуляем оффсеты mpu.setXAccelOffset(0); mpu.setYAccelOffset(0); mpu.setZAccelOffset(0); mpu.setXGyroOffset(0); mpu.setYGyroOffset(0); mpu.setZGyroOffset(0); delay(10); Serial.println("Calibration start. It will take about 5 seconds"); for (byte n = 0; n < 10; n++) < // 10 итераций калибровки for (byte j = 0; j < 6; j++) < // обнуляем калибровочный массив offsets[j] = 0; >for (byte i = 0; i < 100 + BUFFER_SIZE; i++) < // делаем BUFFER_SIZE измерений для усреднения mpu.getMotion6(&mpuGet[0], &mpuGet[1], &mpuGet[2], &mpuGet[3], &mpuGet[4], &mpuGet[5]); if (i >= 99) < // пропускаем первые 99 измерений for (byte j = 0; j < 6; j++) < offsets[j] += (long)mpuGet[j]; // записываем в калибровочный массив >> > for (byte i = 0; i < 6; i++) < offsets[i] = offsetsOld[i] - ((long)offsets[i] / BUFFER_SIZE); // учитываем предыдущую калибровку if (i == 2) offsets[i] += 16384; // если ось Z, калибруем в 16384 offsetsOld[i] = offsets[i]; >// ставим новые оффсеты mpu.setXAccelOffset(offsets[0] / 8); mpu.setYAccelOffset(offsets[1] / 8); mpu.setZAccelOffset(offsets[2] / 8); mpu.setXGyroOffset(offsets[3] / 4); mpu.setYGyroOffset(offsets[4] / 4); mpu.setZGyroOffset(offsets[5] / 4); delay(2); > /* // выводим в порт Serial.println("Calibration end. Your offsets:"); Serial.println("accX accY accZ gyrX gyrY gyrZ"); Serial.print(mpu.getXAccelOffset()); Serial.print(", "); Serial.print(mpu.getYAccelOffset()); Serial.print(", "); Serial.print(mpu.getZAccelOffset()); Serial.print(", "); Serial.print(mpu.getXGyroOffset()); Serial.print(", "); Serial.print(mpu.getYGyroOffset()); Serial.print(", "); Serial.print(mpu.getZGyroOffset()); Serial.println(" "); Serial.println(" "); */ >
Мой вариант калибровки + запись в EEPROM
// калибровка и запись в EEPROM // при запуске настраиваем оффсеты // послать символ в сериал - начать повторную калибровку #include "Wire.h" #include "I2Cdev.h" #include "MPU6050.h" MPU6050 mpu; #define BUFFER_SIZE 100 #define START_BYTE 1010 int16_t ax, ay, az; int16_t gx, gy, gz; void setup() < Wire.begin(); Serial.begin(9600); mpu.initialize(); //----------------- ВСПОМИНАЕМ ОФФСЕТЫ ------------------------ int offsets[6]; EEPROM.get(START_BYTE, offsets); // ставим оффсеты из памяти mpu.setXAccelOffset(offsets[0]); mpu.setYAccelOffset(offsets[1]); mpu.setZAccelOffset(offsets[2]); mpu.setXGyroOffset(offsets[3]); mpu.setYGyroOffset(offsets[4]); mpu.setZGyroOffset(offsets[5]); //----------------- ВСПОМИНАЕМ ОФФСЕТЫ ------------------------ Serial.println(F("Send any character to start sketch")); delay(100); while (1) < //входим в бесконечный цикл if (Serial.available() >0) < // если нажата любая кнопка Serial.read(); // прочитать (чтобы не висел в буфере) break; // выйти из цикла >> delay(1000); > void loop() < calibration(); Serial.println("Current offsets:"); Serial.println("accX accY accZ gyrX gyrY gyrZ"); Serial.print(mpu.getXAccelOffset()); Serial.print(", "); Serial.print(mpu.getYAccelOffset()); Serial.print(", "); Serial.print(mpu.getZAccelOffset()); Serial.print(", "); Serial.print(mpu.getXGyroOffset()); Serial.print(", "); Serial.print(mpu.getYGyroOffset()); Serial.print(", "); Serial.print(mpu.getZGyroOffset()); Serial.println(" "); Serial.println(" "); // выводим значения после калибровки Serial.println("Readings:"); mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); Serial.print(ax); Serial.print(" "); Serial.print(ay); Serial.print(" "); Serial.print(az); Serial.print(" "); Serial.print(gx); Serial.print(" "); Serial.print(gy); Serial.print(" "); Serial.println(gz); delay(20); while (1); >// ======= ФУНКЦИЯ КАЛИБРОВКИ И ЗАПИСИ В ЕЕПРОМ ======= void calibration() < long offsets[6]; long offsetsOld[6]; int16_t mpuGet[6]; // используем стандартную точность mpu.setFullScaleAccelRange(MPU6050_ACCEL_FS_2); mpu.setFullScaleGyroRange(MPU6050_GYRO_FS_250); // обнуляем оффсеты mpu.setXAccelOffset(0); mpu.setYAccelOffset(0); mpu.setZAccelOffset(0); mpu.setXGyroOffset(0); mpu.setYGyroOffset(0); mpu.setZGyroOffset(0); delay(5); for (byte n = 0; n < 10; n++) < // 10 итераций калибровки for (byte j = 0; j < 6; j++) < // обнуляем калибровочный массив offsets[j] = 0; >for (byte i = 0; i < 100 + BUFFER_SIZE; i++) < // делаем BUFFER_SIZE измерений для усреднения mpu.getMotion6(&mpuGet[0], &mpuGet[1], &mpuGet[2], &mpuGet[3], &mpuGet[4], &mpuGet[5]); if (i >= 99) < // пропускаем первые 99 измерений for (byte j = 0; j < 6; j++) < offsets[j] += (long)mpuGet[j]; // записываем в калибровочный массив >> > for (byte i = 0; i < 6; i++) < offsets[i] = offsetsOld[i] - ((long)offsets[i] / BUFFER_SIZE); // учитываем предыдущую калибровку if (i == 2) offsets[i] += 16384; // если ось Z, калибруем в 16384 offsetsOld[i] = offsets[i]; >// ставим новые оффсеты mpu.setXAccelOffset(offsets[0] / 8); mpu.setYAccelOffset(offsets[1] / 8); mpu.setZAccelOffset(offsets[2] / 8); mpu.setXGyroOffset(offsets[3] / 4); mpu.setYGyroOffset(offsets[4] / 4); mpu.setZGyroOffset(offsets[5] / 4); delay(2); > // пересчитываем для хранения for (byte i = 0; i < 6; i++) < if (i < 3) offsets[i] /= 8; else offsets[i] /= 4; >// запись в память EEPROM.put(START_BYTE, offsets); >
Мой алгоритм калибровки
// ======= ФУНКЦИЯ КАЛИБРОВКИ ======= void calibration() < long offsets[6]; long offsetsOld[6]; int16_t mpuGet[6]; // используем стандартную точность mpu.setFullScaleAccelRange(MPU6050_ACCEL_FS_2); mpu.setFullScaleGyroRange(MPU6050_GYRO_FS_250); // обнуляем оффсеты mpu.setXAccelOffset(0); mpu.setYAccelOffset(0); mpu.setZAccelOffset(0); mpu.setXGyroOffset(0); mpu.setYGyroOffset(0); mpu.setZGyroOffset(0); delay(10); for (byte n = 0; n < 10; n++) < // 10 итераций калибровки for (byte j = 0; j < 6; j++) < // обнуляем калибровочный массив offsets[j] = 0; >for (byte i = 0; i < 100 + BUFFER_SIZE; i++) < // делаем BUFFER_SIZE измерений для усреднения mpu.getMotion6(&mpuGet[0], &mpuGet[1], &mpuGet[2], &mpuGet[3], &mpuGet[4], &mpuGet[5]); // пропускаем первые 99 измерений if (i >= 99) < for (byte j = 0; j < 6; j++) < offsets[j] += (long)mpuGet[j]; // записываем в калибровочный массив >> > for (byte i = 0; i < 6; i++) < offsets[i] = offsetsOld[i] - ((long)offsets[i] / BUFFER_SIZE); // учитываем предыдущую калибровку if (i == 2) offsets[i] += 16384; // если ось Z, калибруем в 16384 offsetsOld[i] = offsets[i]; >// ставим новые оффсеты mpu.setXAccelOffset(offsets[0] / 8); mpu.setYAccelOffset(offsets[1] / 8); mpu.setZAccelOffset(offsets[2] / 8); mpu.setXGyroOffset(offsets[3] / 4); mpu.setYGyroOffset(offsets[4] / 4); mpu.setZGyroOffset(offsets[5] / 4); delay(2); > >
Также в библиотеке есть готовые функции для калибровки акселя и гиро, они принимают количество итераций калибровки (до 15):
mpu.CalibrateAccel(6); mpu.CalibrateGyro(6);
Функции блокирующие, выполняются и автоматически выставляют оффсеты, т.е. датчик сразу калибруется. Для чтения оффсетов (например для записи в EEPROM) можно воспользоваться тем же способом, что и раньше:
mpu.getXAccelOffset(); mpu.getYAccelOffset(); mpu.getZAccelOffset(); mpu.getXGyroOffset(); mpu.getYGyroOffset(); mpu.getZGyroOffset();
Получение углов
Самый простой способ – получение углов чисто из ускорения через арксинус/арккосинус. Этот способ плох тем, что даёт угол в диапазоне +-90 градусов, так как имеет место быть gimbal lock.
Углы через тригонометрию
#include «MPU6050.h» MPU6050 mpu; void setup() < Wire.begin(); Serial.begin(9600); mpu.initialize(); // запускаем датчик >void loop() < int16_t ax = mpu.getAccelerationX(); // ускорение по оси Х // стандартный диапазон: +-2g ax = constrain(ax, -16384, 16384); // ограничиваем +-1g float angle = ax / 16384.0; // переводим в +-1.0 // и в угол через арксинус if (angle
Также акселерометр шумит и показания плавают, не говоря о минимальном разрешении +-2g и резком возникновении ошибки при ускорении модуля вдоль измеряемой оси, то есть угол покоящегося модуля он покажет, но стоит начать его двигать – угол изменится. Для точного определения угла использую показания ускорения в связке с угловой скоростью.
Для получения углов из показаний акселерометра и гироскопа есть три основных способа:
- Фильтрация при помощи фильтра Калмана.
- Фильтрация при помощи комплементарного фильтра.
- Определение углов при помощи встроенного в датчик DMP (Digital Motion Processor).
Из всех трёх самый хороший результат даёт встроенный процессор, на его фоне Калман и комплементари можно даже не рассматривать, они практически не работают. Пример рассмотрим в следующей главе ниже.
Ниже привожу совмещённый пример с упрощённым комплементари, обычным и Калманом, всё в одном скетче. Но повторюсь, по сравнению с DMP оно вообще не то показывает =)
Скетч с фильтрами
#define COMPL_K 0.07 #include "Wire.h" #include "Kalman.h" Kalman kalmanX; Kalman kalmanY; uint8_t IMUAddress = 0x68; /* IMU Data */ int16_t accX; int16_t accY; int16_t accZ; int16_t tempRaw; int16_t gyroX; int16_t gyroY; int16_t gyroZ; float accXangle; // Angle calculate using the accelerometer float accYangle; float temp; float gyroXangle = 180; // Angle calculate using the gyro float gyroYangle = 180; float compAngleX = 180; // Calculate the angle using a Kalman filter float compAngleY = 180; float kalAngleX; // Calculate the angle using a Kalman filter float kalAngleY; uint32_t timer; void setup() < Serial.begin(9600); Wire.begin(); Wire.beginTransmission(IMUAddress); Wire.write(0x6B); // PWR_MGMT_1 register Wire.write(0); // set to zero (wakes up the MPU-6050) Wire.endTransmission(true); kalmanX.setAngle(180); // Set starting angle kalmanY.setAngle(180); timer = micros(); >void loop() < //uint32_t looptime = micros(); getValues(); calculateAngles(); //Serial.println(micros() - looptime); Serial.print(kalAngleX); Serial.print(" "); Serial.print(kalAngleY); Serial.println(); /* Serial.print(compAngleX); Serial.print(" "); Serial.print(compAngleY); Serial.println(); */ delay(20); // The accelerometer's maximum samples rate is 1kHz >void getValues() < /* Update all the values */ Wire.beginTransmission(IMUAddress); Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H) Wire.endTransmission(false); Wire.requestFrom(IMUAddress, 14, true); // request a total of 14 registers accX = Wire.read() void calculateAngles() < /* Calculate the angls based on the different sensors and algorithm */ accYangle = (atan2(accX, accZ) + PI) * RAD_TO_DEG; accXangle = (atan2(accY, accZ) + PI) * RAD_TO_DEG; float gyroXrate = (float)gyroX / 131.0; float gyroYrate = -((float)gyroY / 131.0); // Calculate gyro angle without any filter gyroXangle += gyroXrate * ((float)(micros() - timer) / 1000000); gyroYangle += gyroYrate * ((float)(micros() - timer) / 1000000); /* // Calculate gyro angle using the unbiased rate gyroXangle += kalmanX.getRate() * ((float)(micros() - timer) / 1000000); gyroYangle += kalmanY.getRate() * ((float)(micros() - timer) / 1000000); */ /* // Calculate the angle using a Complimentary filter compAngleX = ((float)(1 - COMPL_K) * (compAngleX + (gyroXrate * (float)(micros() - timer) / 1000000))) + (COMPL_K * accXangle); compAngleY = ((float)(1 - COMPL_K) * (compAngleY + (gyroYrate * (float)(micros() - timer) / 1000000))) + (COMPL_K * accYangle); */ // Calculate the angle using a Kalman filter kalAngleX = kalmanX.getAngle(accXangle, gyroXrate, (float)(micros() - timer) / 1000000); kalAngleY = kalmanY.getAngle(accYangle, gyroYrate, (float)(micros() - timer) / 1000000); timer = micros(); >
Библиотека Kalman.h, положи рядом со скетчем
/* Copyright (C) 2012 Kristian Lauszus, TKJ Electronics. All rights reserved. This software may be distributed and modified under the terms of the GNU General Public License version 2 (GPL2) as published by the Free Software Foundation and appearing in the file GPL2.TXT included in the packaging of this file. Please note that GPL2 Section 2[b] requires that all works based on this software must also be made publicly available under the terms of the GPL2 ("Copyleft"). Contact information ------------------- Kristian Lauszus, TKJ Electronics Web : http://www.tkjelectronics.com e-mail : [email protected] */ #ifndef _Kalman_h #define _Kalman_h class Kalman < public: Kalman() < /* We will set the varibles like so, these can also be tuned by the user */ Q_angle = 0.001; Q_bias = 0.003; R_measure = 0.03; bias = 0; // Reset bias P[0][0] = 0; // Since we assume tha the bias is 0 and we know the starting angle (use setAngle), the error covariance matrix is set like so - see: http://en.wikipedia.org/wiki/Kalman_filter#Example_application.2C_technical P[0][1] = 0; P[1][0] = 0; P[1][1] = 0; >; // The angle should be in degrees and the rate should be in degrees per second and the delta time in seconds double getAngle(double newAngle, double newRate, double dt) < // KasBot V2 - Kalman filter module - http://www.x-firm.com/?page_id=145 // Modified by Kristian Lauszus // See my blog post for more information: http://blog.tkjelectronics.dk/2012/09/a-practical-approach-to-kalman-filter-and-how-to-implement-it // Discrete Kalman filter time update equations - Time Update ("Predict") // Update xhat - Project the state ahead /* Step 1 */ rate = newRate - bias; angle += dt * rate; // Update estimation error covariance - Project the error covariance ahead /* Step 2 */ P[0][0] += dt * (dt*P[1][1] - P[0][1] - P[1][0] + Q_angle); P[0][1] -= dt * P[1][1]; P[1][0] -= dt * P[1][1]; P[1][1] += Q_bias * dt; // Discrete Kalman filter measurement update equations - Measurement Update ("Correct") // Calculate Kalman gain - Compute the Kalman gain /* Step 4 */ S = P[0][0] + R_measure; /* Step 5 */ K[0] = P[0][0] / S; K[1] = P[1][0] / S; // Calculate angle and bias - Update estimate with measurement zk (newAngle) /* Step 3 */ y = newAngle - angle; /* Step 6 */ angle += K[0] * y; bias += K[1] * y; // Calculate estimation error covariance - Update the error covariance /* Step 7 */ P[0][0] -= K[0] * P[0][0]; P[0][1] -= K[0] * P[0][1]; P[1][0] -= K[1] * P[0][0]; P[1][1] -= K[1] * P[0][1]; return angle; >; void setAngle(double newAngle) < angle = newAngle; >; // Used to set angle, this should be set as the starting angle double getRate() < return rate; >; // Return the unbiased rate /* These are used to tune the Kalman filter */ void setQangle(double newQ_angle) < Q_angle = newQ_angle; >; void setQbias(double newQ_bias) < Q_bias = newQ_bias; >; void setRmeasure(double newR_measure) < R_measure = newR_measure; >; private: /* Kalman filter variables */ double Q_angle; // Process noise variance for the accelerometer double Q_bias; // Process noise variance for the gyro bias double R_measure; // Measurement noise variance - this is actually the variance of the measurement noise double angle; // The angle calculated by the Kalman filter - part of the 2x1 state matrix double bias; // The gyro bias calculated by the Kalman filter - part of the 2x1 state matrix double rate; // Unbiased rate calculated from the rate and the calculated bias - you have to call getAngle to update the rate double P[2][2]; // Error covariance matrix - This is a 2x2 matrix double K[2]; // Kalman gain - This is a 2x1 matrix double y; // Angle difference - 1x1 matrix double S; // Estimate error - 1x1 matrix >; #endif
Большую кучу теории про Эйлера и кватернионы можно почитать вот здесь.
Оптимальное получение углов
Пример получения углов при помощи DMP и встроенной библиотеки MPU6050_6Axis_MotionApps20.h. Единственное, скетч занимает прилично памяти (11кб Flash и 500б SRAM), так как фактически содержит прошивку для DMP и загружает её в модуль при каждом старте программы. С модуля можно подключить пин INT на один из пинов прерывания МК, например на D2 в случае с Arduino Nano (номер прерывания 0). DMP будет дёргать прерывание, сообщая о готовности, чтобы мы не тратили лишнее время на его постоянный опрос. Но опрашивать то можно и по таймеру (второй пример).
Получаем углы с DMP по прерыванию (обновил скетч!)
#include "I2Cdev.h" #include "MPU6050_6Axis_MotionApps20.h" MPU6050 mpu; volatile bool mpuFlag = false; // флаг прерывания готовности uint8_t fifoBuffer[45]; // буфер void setup() < Serial.begin(115200); Wire.begin(); //Wire.setClock(1000000UL); // разгоняем шину на максимум // инициализация DMP и прерывания mpu.initialize(); mpu.dmpInitialize(); mpu.setDMPEnabled(true); attachInterrupt(0, dmpReady, RISING); >// прерывание готовности. Поднимаем флаг void dmpReady() < mpuFlag = true; >void loop() < // по флагу прерывания и готовности DMP if (mpuFlag && mpu.dmpGetCurrentFIFOPacket(fifoBuffer)) < // переменные для расчёта (ypr можно вынести в глобал) Quaternion q; VectorFloat gravity; float ypr[3]; // расчёты mpu.dmpGetQuaternion(&q, fifoBuffer); mpu.dmpGetGravity(&gravity, &q); mpu.dmpGetYawPitchRoll(ypr, &q, &gravity); mpuFlag = false; // выводим результат в радианах (-3.14, 3.14) Serial.print(ypr[0]); // вокруг оси Z Serial.print(','); Serial.print(ypr[1]); // вокруг оси Y Serial.print(','); Serial.print(ypr[2]); // вокруг оси X Serial.println(); // для градусов можно использовать degrees() >>
Без прерываний, но с таймером
#include "I2Cdev.h" #include "MPU6050_6Axis_MotionApps20.h" MPU6050 mpu; uint8_t fifoBuffer[45]; // буфер void setup() < Serial.begin(115200); Wire.begin(); //Wire.setClock(1000000UL); // разгоняем шину на максимум // инициализация DMP mpu.initialize(); mpu.dmpInitialize(); mpu.setDMPEnabled(true); >void loop() < static uint32_t tmr; if (millis() - tmr >= 11) < // таймер на 11 мс (на всякий случай) if (mpu.dmpGetCurrentFIFOPacket(fifoBuffer)) < // переменные для расчёта (ypr можно вынести в глобал) Quaternion q; VectorFloat gravity; float ypr[3]; // расчёты mpu.dmpGetQuaternion(&q, fifoBuffer); mpu.dmpGetGravity(&gravity, &q); mpu.dmpGetYawPitchRoll(ypr, &q, &gravity); // выводим результат в радианах (-3.14, 3.14) Serial.print(ypr[0]); // вокруг оси Z Serial.print(','); Serial.print(ypr[1]); // вокруг оси Y Serial.print(','); Serial.print(ypr[2]); // вокруг оси X Serial.println(); // для градусов можно использовать degrees() tmr = millis(); // сброс таймера >> >
По производительности дела обстоят так: без прерываний нам приходится проверять готовность DMP, что занимает 146 мкс, а сам DMP готов отдавать данные через каждые 10 мс (9.1 + 0.8). Обработка данных занимает 2 мс, из которых половина – обработка буфера (функция dmpGetCurrentFIFOPacket). Тестовый код для отладки через анализатор выглядел так:
void loop() < fastWrite(13, 1); if (mpu.dmpGetCurrentFIFOPacket(fifoBuffer)) < fastWrite(12, 1); mpu.dmpGetQuaternion(&q, fifoBuffer); mpu.dmpGetGravity(&gravity, &q); mpu.dmpGetYawPitchRoll(ypr, &q, &gravity); fastWrite(12, 1); >fastWrite(13, 0); >
И получились вот такие тайминги: В реальном примере с таймером мы не тратим 146 мкс в цикле, а просто асинхронно ждём 10 (а лучше 11) миллисекунд. Работа с прерыванием или с таймером будет выглядеть более красиво: Если вы вдруг ничего не поняли: оба примера можно смело использовать, прерывание – не панацея, если в программе есть возможность считать время и поднять программный таймер, как во втором примере. Но с прерыванием можно безо всяких таймеров точно поймать момент, когда DMP обработал данные. Если это вдруг нужно.
Некоторые примеры
Определение периода тряски вдоль оси X
Скетч временно не работает, надеюсь починю
// скетч определения периода тряски акселерометра #define DEADZONE 4000 #define MAX_LOOP 900 #include "Wire.h" #include "I2Cdev.h" #include "MPU6050.h" MPU6050 mpu; float k = 0.1; int16_t ax, ay, az, ax_f; int16_t gx, gy, gz; int16_t loopTime; boolean toggle_flag; unsigned long maxTimer, analyzeTimer; void setup() < Wire.begin(); Serial.begin(9600); mpu.initialize(); Serial.println(mpu.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed"); // Acceleration range: ± 2 ± 4 ± 8 ± 16 g // 1G value: 16384 8192 4096 2048 // MAX G value: 32768 mpu.setFullScaleAccelRange(MPU6050_ACCEL_FS_8); // Gyroscope range: 250 500 1000 2000 °/s // MAX value: 32768 mpu.setFullScaleGyroRange(MPU6050_GYRO_FS_250); pinMode(13, OUTPUT); >void loop() < if (millis() - analyzeTimer >= 2) < // шаг анализа периода mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); // запросить данные ax_f += (ax - ax_f) * 0.1; // отфильтровать if (ax_f >DEADZONE && toggle_flag) < toggle_flag = false; digitalWrite(13, 1); loopTime = millis() - maxTimer; // расчёт периода движения maxTimer = millis(); >else if (ax_f < -DEADZONE && !toggle_flag) < toggle_flag = true; digitalWrite(13, 0); loopTime = millis() - maxTimer; // расчёт периода движения maxTimer = millis(); >if (millis() - maxTimer > MAX_LOOP) loopTime = 0; > > Serial.println(loopTime); analyzeTimer = millis(); >
Определение периода вращения (ось Y по радиусу)
// скетч определения периода вращения акселерометра #define DEADZONE 700 #define MIN_LOOP 100 #define MAX_LOOP 900 #include "Wire.h" #include "I2Cdev.h" #include "MPU6050.h" MPU6050 mpu; float k = 0.2; int16_t ax, ay, az, ay_f; int16_t gx, gy, gz; int last_acc, level; boolean rising_flag = true, falling_flag = false, toggle_flag; unsigned long maxTimer, analyzeTimer; int loopTime; void setup() < Wire.begin(); Serial.begin(9600); mpu.initialize(); Serial.println(mpu.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed"); // Acceleration range: ± 2 ± 4 ± 8 ± 16 g // 1G value: 16384 8192 4096 2048 // MAX G value: 32768 mpu.setFullScaleAccelRange(MPU6050_ACCEL_FS_16); // Gyroscope range: 250 500 1000 2000 °/s // MAX value: 32768 mpu.setFullScaleGyroRange(MPU6050_GYRO_FS_250); >void loop() < if (millis() - analyzeTimer >3) < // шаг анализа периода mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); // запросить данные ay_f += (ay - ay_f) * k; // отфильтровать if (rising_flag) // поднимаемся // ждём падения сигнала на величину DEADZONE if (last_acc < ay_f + DEADZONE) < // если сигнал не упал, принять величину как точку для следующего сравнения last_acc = ay_f; toggle_flag = true; >else < // если есть падение, и прошёл минимальный период // (защита от всяких случайных ударов и дёрганий) if (toggle_flag && (millis() - maxTimer >MIN_LOOP)) < toggle_flag = false; rising_flag = false; falling_flag = true; loopTime = millis() - maxTimer; // расчёт периода движения maxTimer = millis(); //level = last_acc; >> if (falling_flag) < // опускается // ждём прироста сигнала на величину DEADZONE if (last_acc >ay_f - DEADZONE) < // падаем // если сигнал не вырос, принять величину как точку для следующего сравнения last_acc = ay_f; toggle_flag = true; >else < // если есть прирост, и прошёл минимальный период // (защита от всяких случайных ударов и дёрганий) if (toggle_flag && (millis() - maxTimer >MIN_LOOP)) < toggle_flag = false; rising_flag = true; falling_flag = false; //level = last_acc; >> > /* Serial.print("$"); Serial.print(ay_f); Serial.print(" "); Serial.print(level); Serial.print(" "); Serial.print(loopTime*10); Serial.println(";"); */ if (millis() - maxTimer > MAX_LOOP) loopTime = 0; Serial.println(loopTime); analyzeTimer = millis(); > >
Сигнализация, высокоточное определение вибрации
// простая сигнализация // датчик реагирует даже на постукивание // пальцем на противоположном конце стола #include "Wire.h" #include "I2Cdev.h" #include "MPU6050.h" MPU6050 mpu; int16_t ax, ay, az; int16_t gx, gy, gz; long ACC, GYR; long maxACC, maxGYR, trACC, trGYR; void setup() < Wire.begin(); Serial.begin(9600); mpu.initialize(); mpu.setFullScaleAccelRange(MPU6050_ACCEL_FS_2); delay(2000); // "калибровка" максимальных значений for (int i = 0; i < 30; i++) < mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); ACC = abs(ax) + abs(ay) + abs(az); GYR = abs(gx) + abs(gy) + abs(gz); if (ACC >maxACC) maxACC = ACC; if (GYR > maxGYR) maxGYR = GYR; delay(5); > maxACC = maxACC + trACC; maxGYR = maxGYR + trGYR; > void loop() < mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); // сумма модулей ACC = abs(ax) + abs(ay) + abs(az); GYR = abs(gx) + abs(gy) + abs(gz); if (ACC >maxACC || GYR > maxGYR) < Serial.println("KEK!"); >delay(10); >
Прерывание по движению (NEW!)
Настраиваем датчик на выдачу прерываний по движению (например для сигнализации). Таким же образом можно настроить на прерывания по свободному падению, см. доку выше.
#include "MPU6050.h" MPU6050 mpu; void setup() < // запускаем всё Wire.begin(); Serial.begin(9600); mpu.initialize(); mpu.setInterruptMode(true); // включаем режим прерываний mpu.setIntMotionEnabled(true); // включаем прерывания движения mpu.setMotionDetectionThreshold(2); // порог 0..255 mpu.setMotionDetectionDuration(2); // таймаут 0..255 attachInterrupt(0, isr, RISING); // прерывание >volatile bool motion; void isr() < motion = true; // флаг прерывания >void loop() < // по флагу прерывания пишем в порт // прерыванием можно будить МК и так далее if (motion) < Serial.println("Motion!"); motion = false; >>
Что касается получения линейных скоростей и перемещений при помощи двойного интегрирования ускорения (инерционная навигация), то задача не очень простая, нужны хитрые многоосевые фильтры и желательно процессор помощнее, также об этом можно почитать вот тут.
MPU-6050 3 осевой гироскоп и акселерометр

Пункты выдачи СДЭК. Доставка до пункта выдачи Срок доставки 1-4 рабочих дня.
Курьерская доставка СДЭК. Доставка с 10 до 18. Срок доставки 1-4 рабочих дня.
Получить в магазине. пр.Стачек, д.72, пом.153а. Правый вход. Можно забрать в рабочее время.
Варианты оплаты:
Картами Visa, Mastercard и Мир. В том числе Сбербанк Онлайн, Альфа-Клик, ВТБ24-Онлайн, PSB On-Line, Русский Стандарт.

Наличными в магазине.
С этим товаром часто покупают:
Лучшее в категории:

Этот товар можно купить только в магазине по адресу Санкт-Петербург, пр.Стачек, д.72. ДК Газа правый вход.
Мы не можем отправить его курьером или в пункты выдачи заказов.
Продолжить покупки
- 8 812 987-72-59
- 8 800 707-31-15
- Санкт-Петербург, пр. Стачек, д.72, пом.153
- ПН-ВС 11:00-20:00
- info@fixfly.ru
- ИП Архипов Егор Владимирович
- ИНН 782510647536
- ОГРНИП 314784709300902
- [договор-оферта][СОУТ]
- [политикa конфиденциальности]
- [согласие на обработку персональных данных]
- [политика использования файлов сookie]
Модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050


Позволяет определить положение и перемещение прибора в пространстве: углы крена, дифферента (тангажа) ориентируясь по вектору силы тяжести и скорости вращения. Измеряет температуру. При перемещении определяет линейное ускорение и угловую скорость по трем осям, что дает полную картину положения. Как работает модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 показано на видео.
Основа модуля – микросхема MPU-6050. Содержит два устройства акселерометр и гироскоп. Их данные проходят предварительную обработку и передаются по последовательному интерфейсу I2C в микроконтроллер.
Модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 является электронным аналогом нашего вестибулярного аппарата. Благодаря вестибулярному аппарату или похожему органу живые существа чувствуют направление тяготения. Вестибулярный аппарат на подсознательном уровне позволяет нам держать равновесие. Одно из применений гироскопа и акселерометра – электрическая система удержания баланса сигвея как показано в видеофрагменте.
Благодаря отслеживанию вектора силы тяжести акселерометр может применяться как электронная альтернатива обычному строительному уровню. На основе акселерометра строят угломеры относительно тяготения земли – инклинометры. Они применяются для контроля за архитектурными сооружениями, при бурении скважин.
Комплекс из гироскопа и акселерометра применяется для стабилизации объекта в требуемом положении при внешних воздействиях. Например, поддержание положения объектива при съемке из автомобиля, с борта катера или квадрокоптера. Эффективность применения гироскопа при съемке для стабилизации объектива по двум осям при качке иллюстрирует видео.
Теперь применяя гироскоп-акселерометр GY-521 можно отказаться от джойстика, рукояток и прочих механических устройств в стационарных пультах управления. Применение гироскопа-акселерометра для управления положением веб-камеры с помощью сервоприводов показано далее.
Интересно применить гироскоп и акселерометром для управления манипулятором. Работа модели такой системы на видео.
Наиболее интересное применение гироскопа и акселерометра – в движущихся полуавтоматических и автоматических системах. Прибор измеряет и сообщает микроконтроллеру о ускорении и ориентации. Динамические параметры подвижного объекта, которые измеряет модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050: тангаж (нос вверх и вниз), рыскание (нос влево и вправо) и крен (по часовой стрелке или против часовой стрелки глядя из кабины объекта). Они в навигационной системе подаются в МК, который рассчитывает текущее положение. Полет квадрокоптера без такого модуля невозможен.
Характеристики
Питание
напряжение 3,7 – 5,5 В
ток до 10 мА
гироскоп потребляет 3,6 мA, в режиме ожидания 5 мкА
акселерометр потребляет 350 мкА.
В режиме ожидания:
10 мкА для 1,25 Гц,
20 мкА для 5 Гц,
60 мкА для 20 Гц,
110 мкА для 40 Гц.
Максимальная частота интерфейса I2C составляет 400 кГц
Формат данных: углы Эйлера, кватернионы, матрица поворота или необработанные данные
Диапазон гироскопа: ±250, ±500, ±1000, и ±2000 градусов в секунду
Диапазон акселерометра: ±2, ±4, ±8 и ±16 g
16 бит вывода данных
Резонансная частота 27 кГц
Шум 0,005°/с/√Гц
Расстояние между контактами 2,54 мм
Отверстия под винт 3 мм
Размеры 20 x 16 мм
Теория кратко
Трехосевой акселерометр ”чувствует” проекции ускорения на оси X, Y и Z. Если прибор размещен строго горизонтально и не движется то проекции ускорения силы тяжести на оси X и Y равны нулю. Сила тяготения воспринимается только чувствительными элементами вертикальной оси Z. Время от времени в состоянии покоя производят проверку и калибровку акселерометра. Во время движения объект постоянно то ускоряется, то замедляется. Идеально равномерного движения не существует. Это и позволяет использовать акселерометр не только для определения положения объекта, но и для определения динамических параметров при движении. Акселерометр регистрирует сумму ускорения при движении и гравитацию. Если от всех элементов акселерометра по осям X, Y, Z поступают показания близкие к нулю, значит, двигатель выключен и объект находится в свободном падении – выпускаем парашют. Возрастание данных – парашют раскрылся, резкое возрастание данных – столкновение, есть посадка!
Трехосевой гироскоп – датчик поворота объекта, позволяющий вычислить углы поворотов по осям X, Y, Z благодаря определению угловых скоростей.
Roll (крен), Pitch (Тангаж) и Yaw (рыскание).
РАСПОЗНОВАНИЕ И ОБРАБОТКА ПАРАМЕТРОВ ДВИЖЕНИЯ
Предположим квадрокоптер при горизонтальном полете накренился. Акселерометр фиксирует изменение ускорение по осям. Теперь к ускорению движения прибавляется ускорение тяготения в другом порядке, не так как при полете без крена. В результате система управления сделает вывод о движении в сторону крена, хотя на самом деле происходит горизонтальное движение. Для правильной обработки параметров движения и верного распознавания динамических параметров применяют совместно акселерометр и гироскоп.
При использовании гироскопа в рассмотренном случае он определит угол поворота и даст возможность правильно интерпретировать данные акселерометра. Использование гироскопа без акселерометра невозможно из-за особенностей математики гироскопа приводящих к накоплению погрешности. Специальная математика позволяет объединить обработку данных от обоих датчиков.
Гироскопы и акселерометры широко применяются в авиации, ракетной, космической и военной технике. Например. Произошел захват цели прицелом танка во время движения. Перемещение по пересеченной местности вызывает мощные искажения угла подъема ствола орудия. Зафиксировать прицел на захваченной цели помогает акселерометр и гироскоп.
Микросхема MPU-6050
Напряжение питания 2,3 – 3,6 В. Номинальное 3,3 В. Микросхема MPU-6050 содержит запатентованный компанией InvenSense процессор обработки сигналов, вызванных движением Digital Motion Processor (DMP), способный обрабатывать алгоритмы MotionFusion. DMP может быть использован для сложных расчетов. Собственный процессор может делать расчеты, не отвлекая микроконтроллер и даже способен обрабатывать информацию от другого датчика, подключенного ко второй шине I2C. Специальная программа на языке команд DMP записывается в память каждый раз после подачи питания. Это занимает около секунды. Программа фильтрует показания акселерометра и гироскопа. Данные передаются в буфер FIFO. Некоторые рассуждения об этом здесь.
Для точного отслеживания движений предусмотрена возможность записи в память MPU-6050 актуальных пределов измерений. Данные можно считывать из регистров хранения или буфера FIFO размером 1024 байт. Микросхема MPU-6050 может работать в режиме мастер на шине I2C для контактов XDA и XCL. Содержит АЦП 16 бит. Есть регистр под названием Who am I (как меня зовут) хранящий адрес модуля GY-521 на шине I2C. Значение в регистре 104 десятичное или 68 шестнадцатеричное. Есть выход для прерываний МК, который настраивается под интересующее событие. Микросхема MPU-6050 содержит более 100 регистров.
Адрес микросхемы может быть двух значений (без бита чтения / записи) в зависимости от состояния вывода AD0 модуля 3-х осевого гироскопа и акселерометра GY-521 MPU-6050.
68 (шестнадцатиричное), если AD0 соединен с общим проводом.
69 (шестнадцатиричное), если AD0 соединен с потенциалом лог. 1.
Акселерометр микросхемы MPU-6050 использует пьезоэлектрический эффект. Представьте кубический ящик, имеющий внутри маленький шарик. Стенки этой коробки выполнены из пьезоэлектрических кристаллов. Когда вы наклоните коробку, шар будет двигаться в направлении наклона. Стена, с которой шар сталкивается, создает крошечные пьезоэлектрические токи. В зависимости от тока, получаемого от стен, определяется направление наклона и его величина.
Гироскоп представляет собой колеблющуюся пьезоэлектрическую пластину. При повороте пластина искривляется и ее электрические параметры меняются. Это регистрирует микросхема. Подробнее на видео.
Схема модуля GY-521
Питание модуля GY-521 поступает на вход стабилизатора напряжения Q2 микросхема MIC5205-3.3BM5 с выходным напряжением 3,3 В. На стабилизаторе происходит небольшое падение напряжения 0,3 – 0,4 В, поэтому напряжение питания модуля должно быть выше 3,3 В. Индикатор питания модуля 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 – светодиод D1. Величина резисторов R4 и R5 может отличаться от указанных на схеме.
Назначение контактов
VCC – напряжение питания
GND – общий провод
SCL – тактовый сигнал I2C
SDA – данные I2C
XDA – данные шины I2C при работе в режиме мастера
XCL – тактовый сигнал шины I2C при работе в режиме мастера
AD0 – бит 0 адреса I2C
INT – выход сигнала о готовности данных для использования как внешнего прерывания МК
Подключение модуля 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 к Arduino UNO.
5 V Arduino – VCC
GND Arduino – GND
A4 Arduino – SDA
A5 Arduino – SCL
GND Arduino – AD0
В зависимости от программы – INT
Подводные камни, рифы и турбулентность
При изучении работы микросхемы MPU-6050 гироскопа следует помнить, что механические гироскопы стабилизируются в пространстве за счет своих физических свойств. Электронный гироскоп так работать не может. Он лишь измеряет скорость вращения.
Каждый модуль GY-521 требует калибровки. Показания датчиков имеют некоторое смещение относительно нуля, что вносит погрешность в измерения. Нужно учесть это смещение для каждой оси гироскопа и каждой оси акселерометра, внести корректировку в программу. При производстве микросхем невозможно получить абсолютную точность угла между осями датчиков, поэтому угол между ними содержит погрешность. Также нельзя забывать о том, что данные от трех осей могут иметь разную пропорциональность.
Наибольшая точность результатов математических преобразований для получения параметров движения будет получена при синхронном считывании данных акселерометра и гироскопа.
При построении управляемой машины следует избегать в механизмах источников колебаний и их гармоник с частотой резонанса указанной в характеристиках.
При первом ознакомлении с модулем проверяют его работу на шине данных I2C. Для этого используют программу I2C сканер.
Внутреннее АЦП микросхемы очень чувствительно, его разрядность 16 бит. При такой чувствительности предъявляются повышенные требования к питанию модуля, несмотря на собственный стабилизатор. Здесь не подходит источник питания класса ”какой есть” на 5 В. Прежде всего надо разобраться с параметром используемого блока питания величина пульсаций или уровень шумов с помощью осциллографа. Величина шума в линии питания не должна превышать 50 мВ. Применение батарей в этих условия уместно, но это дорого. Установка конденсаторов не снизит шумы некачественного блока питания. Если блок питания шумит от него надо отказаться, заменить или собрать другой. В тоже время установка конденсаторов на линиях питания возле модуля GY-521 снизит влияние мощных электромагнитных помех. Рекомендуется провода питания перевить в витую пару. Нельзя использовать блок питания один и тот же для модуля и для питания двигателей. При калибровке модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 должен иметь собственный источник, отдельный от модуля МК и других потребителей. Если на этапе первого запуска еще можно смириться с повышенным шумом в питании, то на этапе калибровки это приведет к ошибкам, а о высокой точности измерений без качественного питания говорить не приходится.
Программирование на ардуино и математика
Один из способов использования модуля GY-521 – применение микроконтроллерного модуля Arduino. Программное обеспечение Arduino позволяет установить библиотеки для GY-521. Есть сложная библиотека I2Cdevlib для доступа к MPU-6050 и другим устройствам на шине I2C.
Она устанавливается в папку MPU6050. Использует аппаратный буфер микросхемы и возможности цифровой обработки параметров движения MPU-6050 для выполнения преобразования данных между различными системами координат и объединяет данные от нескольких датчиков. Еще одна полезная библиотека FreeIMU, ориентированная на инерциальный измерительный блок из нескольких датчиков и может выполнять сложную обработку данных. FreeIMU использует I2Cdevlib, но последняя версия I2Cdevlib в комплекте с FreeIMU вызывает конфликт версий. Перед использованием следует убедиться в правильном выборе версии I2Cdevlib.
В конце этого раздела приведены ссылки на адаптированные программы. При работе программ будут получены примерно следующие числа, но их нужно преобразовать в значимые данные.
MPU-6050
Read accel, temp and gyro, error = 0
accel x,y,z: -123, -180, 14547
temperature: 27.235 degrees Celsius
gyro x,y,z : -6, -20, 52,
MPU-6050
Read accel, temp and gyro, error = 0
accel x,y,z: -195, -203, 14510
temperature: 27.128 degrees Celsius
gyro x,y,z : -15, 14, 72,
MPU-6050
Read accel, temp and gyro, error = 0
accel x,y,z: -232, -268, 14490
temperature: 27.190 degrees Celsius
gyro x,y,z : -4, -7, 45,
MPU-6050
Read accel, temp and gyro, error = 0
accel x,y,z: -189, -170, 14632
temperature: 27.199 degrees Celsius
gyro x,y,z : -4, -7, 50,
.
В начале программы должна происходить калибровка по первым 10 данным для получения постоянных погрешностей (смещений) от датчиков. Смещения вычитаем из необработанных значений датчика до преобразования данных в углы.
Для вычисления ориентации акселерометром, мы опираемся на тот факт, что происходит постоянное гравитационное притяжение 1 g. Если нет дополнительных сил, действующих на акселерометр, то обнаруженная величина ускорения будет 1 g.
Согласно описанию MPU-6050 с. 13 (Sensitivity Scale Factor), сырые данные акселерометра программой преобразуются в ускорение свободного падения g=9,8 м/с^2 путем деления на коэффициент 16384. При перемещении и вращении датчика, данные акселерометра сильно колеблются. Если они могут быть очищены от шумов, то акселерометр обеспечит точные результаты.
Для вычисления ориентации, мы должны сначала инициализировать гироскоп с известным значением (возможно, от акселерометра), затем измерять угловую скорость ω через интервалы времени Δt. Тогда ω × Δt = изменение угла. Проблема с этим подходом заключается в том, что мы интегрируем. Многократное суммирование приращения ω × Δt приведет к увеличивающейся со временем ошибке. Это является причиной гироскопического дрейфа.
Деление сырых данных гироскопа на 131 дает угловую скорость в градусах в секунду. 131 — коэффициент чувствительности гироскопа в заданном режиме 250 град/с. Поскольку у него АЦП 16 бит, то модуль максимального необработанного значения равен 32767. Теперь 32767 / 250 = 131 условных единиц на градус в секунду. То есть, если необработанное значение равно 131, то угловая скорость равна 1 градус в секунду.
С помощью этих данных можно получить положение объекта. Для этого мгновенное значение угловой скорости умножим на промежуток времени между опросами датчика гироскопа. Например, разрешение 2000 градусов в секунду, время между опросами 0,1 с, значение мгновенной скорости 210, значит 210*0,1=21 – за это время произошел поворот на 21 градус. Далее каждое полученное значение нужно сложить с предыдущим.
Как объяснено выше данные акселерометра и гироскопа склонны к систематическим ошибкам. Акселерометр обеспечивает получение точных данных в долгосрочной перспективе, но дает сильный шум при рассмотрении за короткий промежуток времени. Гироскоп обеспечивает получение точных данных о изменении ориентации за короткий промежуток времени, но при интеграции данных происходит дрейф.
Решение этих проблем заключается в использовании данных акселерометра и гироскопа вместе таким образом, чтобы ошибки взаимно уничтожались. Стандартный способ объединения – применение фильтра Калмана, который является довольно сложной методикой. Есть более простая аппроксимация для объединения этих двух типов данных – комплементарный фильтр. Хорошо объяснено здесь и здесь. Вот формула комбинирования данных обоих датчиков:
Угол фильтра = α × (Угол от гироскопа) + (1 − α) × (Угол от акселерометра)
α=τ/(τ + Δt)
Угол от гироскопа = (Последний угол измеренный фильтром) + ω×Δt
Δt = время выборки
τ = постоянная времени превышающая интервалы между шумами
Угол фильтра – отфильтрованный, результирующий угол наклона
Рекомендуется время выборки около 0,04 с и постоянная времени около 1 с, что дает α≈0,96.
Величина угла наклона представляет собой сумму интегрированного значения гироскопа и мгновенного значения акселерометра. Главная задача комплементарного фильтра в том, чтобы ликвидировать дрейф нуля гироскопа и ошибки дискретного интегрирования. На каждом шаге интегрирования (шаге цикла управления машиной) корректируется интеграл угла наклона с помощью показаний акселерометра. Сила этой коррекции определяется коэффициентом фильтра α. Выбор коэффициента α зависит от величины дрейфа нуля гироскопа, от скорости накопления ошибок вычисления и от условий использования машины. Так, слишком малое значение α приведет к тому, что на результат работы фильтра будет влиять вибрация корпуса. Как правило, коэффициент комплементарного фильтра подбирается вручную для каждого случая.
Программное обеспечение модуля 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 для ардуино:
GY_521_send_serial
ShowGY521Data
Англоязычная версия этого раздела, а продолжение разговора здесь.
Современное применение акселерометра и гироскопа:
Домашняя страница MPU-6050 Accelerometer + Gyro
объемная
Ардуино: акселерометр MPU6050
Акселерометр — это прибор, позволяющий измерять ускорение тела под действием внешних сил. Подробно об устройстве этого датчика мы уже рассказывали на одном из уроков: Акселерометр: что это такое и как им определять наклон тела
На этот раз мы перейдем от теории к практике: подключим датчик к Ардуино, и напишем пару программ для работы с ним. Подключать будем модуль MPU6050 от RobotClass.

В основе этого модуля лежит микросхема MPU6050, в которой размещаются сразу два датчика: акселерометр и гироскоп. На плате уже имеется вся необходимая обвязка, а также преобразователь напряжения.
Характеристики модуля MPU6050 ROC:
- напряжение питания: от 3,5 до 6 В;
- потребляемый ток: 500 мкА;
- ток в режиме пониженного потребления: 10 мкА при 1,25 Гц, 20 мкА при 5 Гц, 60 мкА при 20 Гц, 110 мкА при 40 Гц;
- диапазон: ± 2, 4, 8, 16g;
- разрядность АЦП: 16;
- интерфейс: I2C (до 400 кГц).
Список необходимых компонентов
Для выполнения всех экспериментов в данном уроке, кроме самого датчика MPU6050, потребуются: Ардуино-совместимый контроллер и немного проводов вилка-розетка. Необходимые компоненты можно добавить в корзину прямо здесь, и затем оформить заказ в нашем интернет-магазине.
Подключение MPU6050 к Ардуино
На плате имеется восемь контактов:
- VCC — положительный контакт питания;
- GND — земля;
- SDA — линия данных I2C;
- SCL — линия синхроимпульсов I2C;
- INT — настраиваемое прерывание;
- AD0 — I2C адрес; по-умолчанию AD0 подтянут к земле, поэтому адрес устройства — 0x68; если соединить AD0 к контактом питания, то адрес изменится на 0x69;
- XCL, XDA — дополнительный I2C интерфейс для подключения внешнего магнитометра.
Соединим контакты датчика с Arduino Uno согласно стандартной схеме для интерфейса I2C:
| MPU6050 ROC | GND | VCC | SDA | SCL |
| Ардуино Уно | GND | +5V | A4 | A5 |
Принципиальная схема

Внешний вид макета

Программа для получения сырых данных с акселерометра MPU6050
Составим программу, которая будет каждые 20 миллисекунд получать данные из MPU6050 и выводить их в последовательный порт.
#include "I2Cdev.h" #include "MPU6050.h" #define T_OUT 20 MPU6050 accel; unsigned long int t_next; void setup() < Serial.begin(9600); accel.initialize(); Serial.println(accel.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed"); >void loop() < long int t = millis(); if( t_next < t )< int16_t ax_raw, ay_raw, az_raw, gx_raw, gy_raw, gz_raw; t_next = t + T_OUT; accel.getMotion6(&ax_raw, &ay_raw, &az_raw, &gx_raw, &gy_raw, &gz_raw); Serial.println(ay_raw); // вывод в порт проекции ускорения на ось Y >>Для работы программы потребуются библиотеки: MPU6050 и I2Cdev, ссылки на которые можно найти в конце урока.
Загружаем программу на Ардуино и открываем окно графика. Поворачиваем датчик вокруг оси X на 90 градусов в одну сторону, потом на 90 в другую. Получится примерно такая картина.

На графике хорошо видно, что при наклоне оси Y вертикально, акселерометр выдает значения близкие к четырём тысячам. Откуда берется это число?
Точность измерения ускорения в MPU6050
Дело в том, что датчик MPU6050 позволяет настраивать точность измерений. Можно выбрать один из четырех классов точности: ±2G, 4G, 8G и 16G, где 1G — это одна земная гравитация. Используемая нами библиотека по-умолчанию настраивает датчик на диапазон ±8G (прим. по ссылке внизу статьи библиотека по-умолчанию устанавливает ±2G).
С другой стороны, MPU6050 имеет 16 разрядный АЦП. 2 в степени 16 даст нам число 65 536. Поскольку датчик может измерять и отрицательное и положительное ускорение, то он будет выдавать нам числа от -32768 до +32768.
Сложив эти два факта вместе получаем, что при таких настройках 1G будет равен числу 4096 (ну а -1G равен числу -4096). Это вполне совпадает с наблюдаемыми на графике значениями!
Следующий шаг — преобразование этих странных чисел в привычные нам углы, измеряемые в градусах.
Программа для вычисления угла наклона акселерометра MPU6050
Добавим в предыдущую программу вычисление угла поворота датчика вокруг оси X:
#include "I2Cdev.h" #include "MPU6050.h" #define TO_DEG 57.29577951308232087679815481410517033f #define T_OUT 20 MPU6050 accel; float angle_ax; long int t_next; float clamp(float v, float minv, float maxv)< if( v>maxv ) return maxv; else if( v void setup() < Serial.begin(9600); accel.initialize(); // первичная настройка датчика Serial.println(accel.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed"); >void loop() < long int t = millis(); if( t_next < t )< int16_t ax_raw, ay_raw, az_raw, gx_raw, gy_raw, gz_raw; float ay,gx; t_next = t + T_OUT; accel.getMotion6(&ax_raw, &ay_raw, &az_raw, &gx_raw, &gy_raw, &gz_raw); // сырые данные акселерометра нужно преобразовать в единицы гравитации // при базовых настройках 1G = 4096 ay = ay_raw / 4096.0; // на случай, если на акселерометр действуют посторонние силы, которые могут // увеличить ускорение датчика свыше 1G, установим границы от -1G до +1G ay = clamp(ay, -1.0, 1.0); // функция acos возвращает угол в радианах, так что преобразуем // его в градусы при помощи коэффициента TO_DEG if( ay >= 0) < angle_ax = 90 - TO_DEG*acos(ay); >else < angle_ax = TO_DEG*acos(-ay) - 90; >Serial.println(angle_ax); // вывод в порт угла поворота вокруг оси X > >Загружаем программу в Ардуино и снова пробуем вращать датчик. Теперь на графике отображается угол наклона в градусах!

Ну вот, мы получили уже что-то пригодное для дальнейшего использования. Видно, что датчик поворачивался сначала на 30 с лишним градусов в одну сторону, потом примерно на 60 в другую. Работает!
Заключение
На этом уроке мы получили с датчика MPU6050 сначала сырые данные, а потом и угол его наклона в градусах. Это большое достижение. Но впереди еще немного математики и еще более крутые результаты! Будем делать комплементарный фильтр, который позволит работать с датчиком даже в условиях вибрации и тряски.
Несколько идей/заданий:
- Детектор стука, он же детектор попадания пули в мишень. Программа должна обнаружить всплеск показаний датчика по одной из осей и сигнализировать об этом, например, с помощью зуммера.
- Кодовый замок, открывающийся по определенной последовательности стука. То же, что и в предыдущем задании, только нужно считать паузы между стуками и сверять их с эталонной последовательностью.
- Детектор свободного падения. Если значения акселерометра по всем трем осям близки к нулю, значит тело находится в состоянии свободного падения.
- Пульт управления роботом. Можно прикрепить датчик на перчатку и отслеживать наклоны ладони по двум осям. Передавать значения датчика через Bluetooth роботу.
Принципиальная схема датчика

Полезные ссылки
- Спецификация производителя MPU6050
- Сборник библиотек для устройств I2C
- Библиотека MPU6050
- Библиотека I2Cdev
Изменено: 5 Янв, 2018 23:06
Ардуино: акселерометр MPU6050 : 33 комментария
Евгений говорит 11.03.2018 в 02:24 :
Подробная статья, чувствуется что автор хорошо владеет материалом.
А не доводилось ли автору использовать MPU-6050 для вычисления траектории? Если такой опыт имеется, то прошу поделиться. Спасибо!
Никита говорит 24.07.2022 в 22:47 :
вычислять траекторию по измеренниям (3 ускорения и 3 угловой скорости) — дохлый номер, поскольку дрейф гироскопа постоянно придется занулять, а сделать это можно только тогда, когда тело будет покоится.
что-то похожее, что вы хотли делали в этом видео https://www.youtube.com/watch?v=6ijArKE8vKU&t=9s&ab_channel=SebMadgwickResearch
Владимир говорит 14.03.2018 в 22:30 :
Всё хорошо, но автору нужно быть корректнее. Если что-то объясняешь, то не должно быть ошибок. Иначе начинающий, попробовав приведённые примеры и не получив положительного результата, может вообще забить на тему.
Загрузив первый пример, тут же получаешь ошибку компиляции. А проблема в ошибке: Объявляется MPU6050 accel;, а дальше применяется accelgyro (должно быть одинаково). Мелочь, конечно, но начинающего может ввести в ступор. Далее объясняется, откуда взялось «4000 тысячам», а фактически значения около 16000. Фразу «открываем окно графика» тоже не сразу понять. Оказывается, в версии 1.8.5 IDE Arduino появилось «Плоттер по последовательному соединению». Дальше пока не разбирался, но хотелось бы начать въежать в тему, а не ребусы разгадывать.
Олег Евсегнеев говорит 16.03.2018 в 00:37 :
Владимир, спасибо за замечания! Код исправили. Насчёт 4000 вместо 16000, то это особенность той версии библиотеки, с которой запускалась программа. В текущей версии действительно стоит другой диапазон — ±2G, поэтому и числа у вас ±16000.
А плоттер хорошая штука, рекомендую всегда иметь под рукой свежую версию IDE, благо она свободно распространяемая!